
採用した戦略
片持ちのレールをペデスタル開口部から挿入し、そのレール上をレール曲げロボットとカメラ運搬ロボットを走らせる戦略を採用した。片持ちのレールを採用することで、どの機構も格納容器内に接触せず、落下しているデブリや障害物を避けられると考えた。先端にカメラが設置されているレールを前後左右に動かすことで、障害物を避けながら格納容器内部を常時観察できるようになっている。(fig.1)
レールが自立して曲がるのではなくロボットによりレールを曲げることで、重量物となるアクチュエータをレール本体に取り付ける必要を無くし、片持ちにも関わらず変形が小さくなる構造体を目指した。
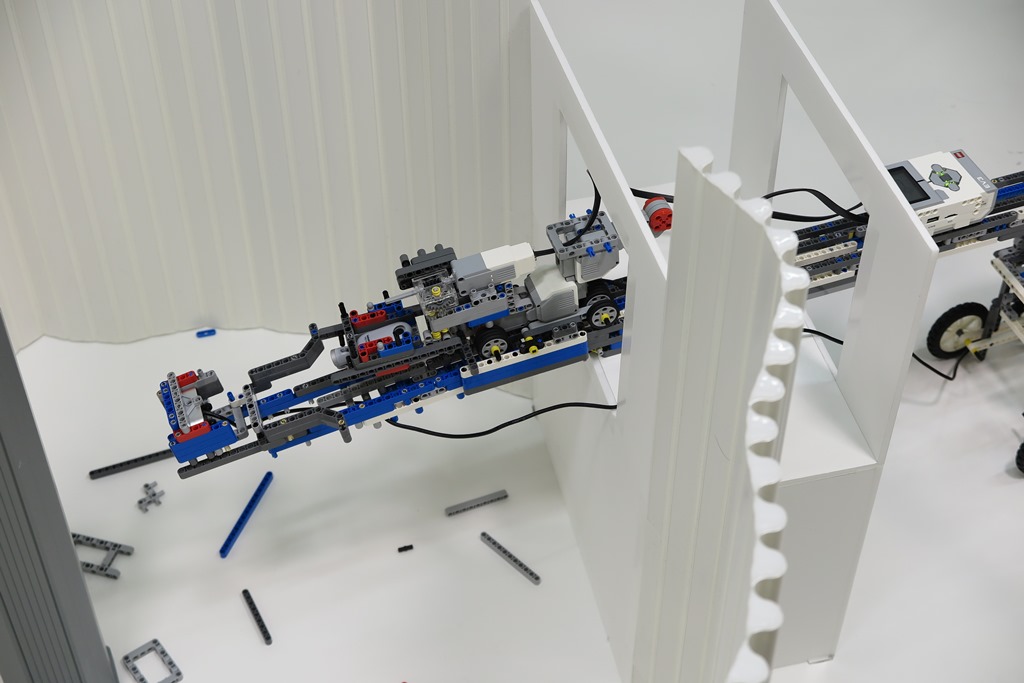
Fig. 1
製作したロボットの概要
- 探索用レール
左右に曲がる関節を一段持ったレールと、そのレールの前後の動きを格納容器外から支配する台座で構成される。(fig.2)レール先端には走査用カメラ設置部が設けられている。(fig.3) また、先端正面には固定式カメラが設置され、レール前方の障害物を監視している。(fig.4) 関節にはラック&ピニオン式の歯車を採用した。
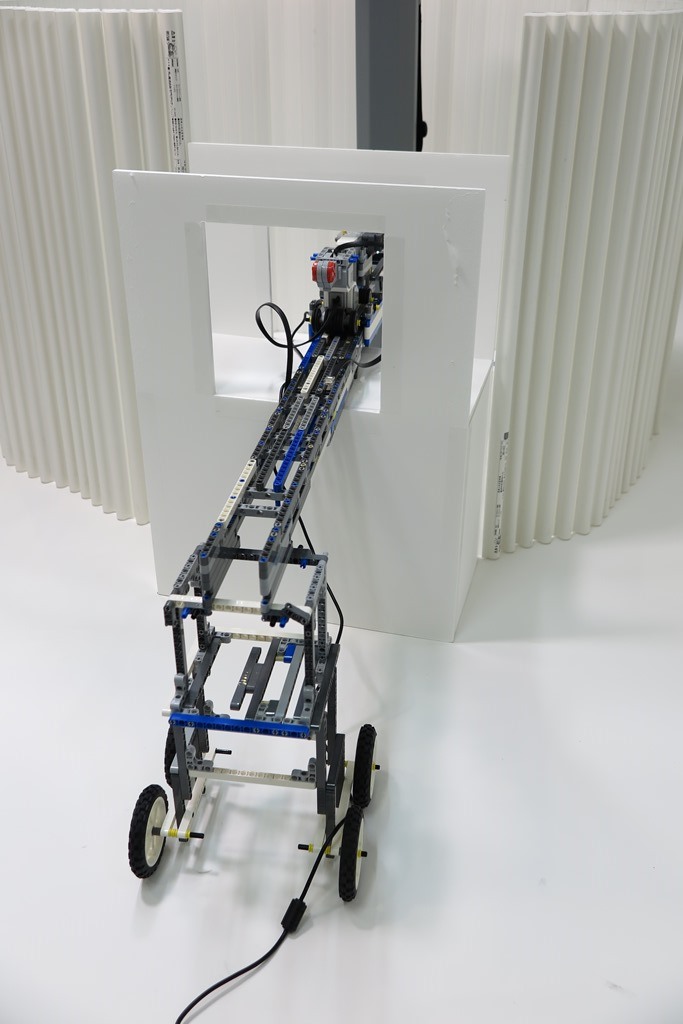
Fig. 2
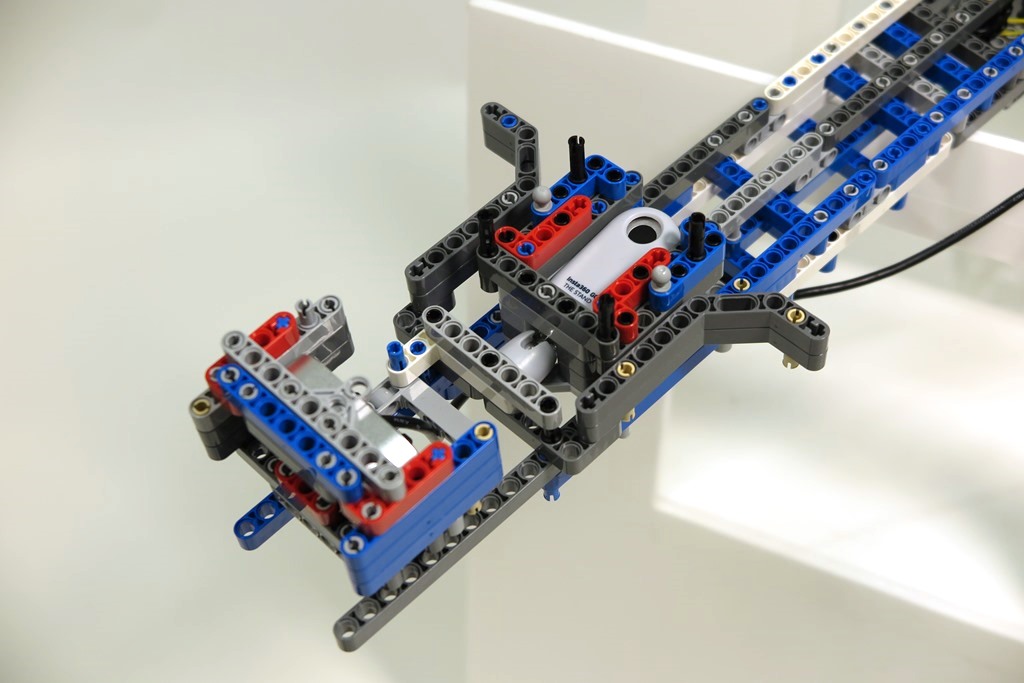
Fig. 3
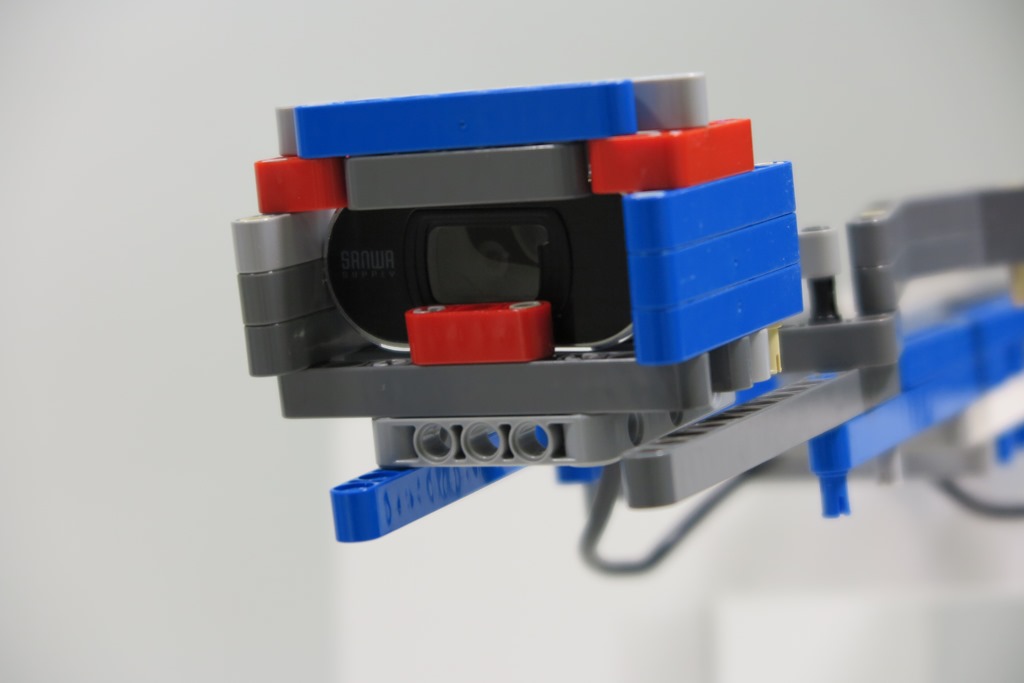
Fig. 4
- レール屈曲ロボット
レールに沿って移動させるためにガイドを付けた。ガイドによって進行方向が決まるため、アクチュエータは前輪用モータの一つのみとなっている。 レール上の特定の位置で停止し、前方についている爪を左右に振ることで、レールを曲げることができる。(fig.5, fig.6)
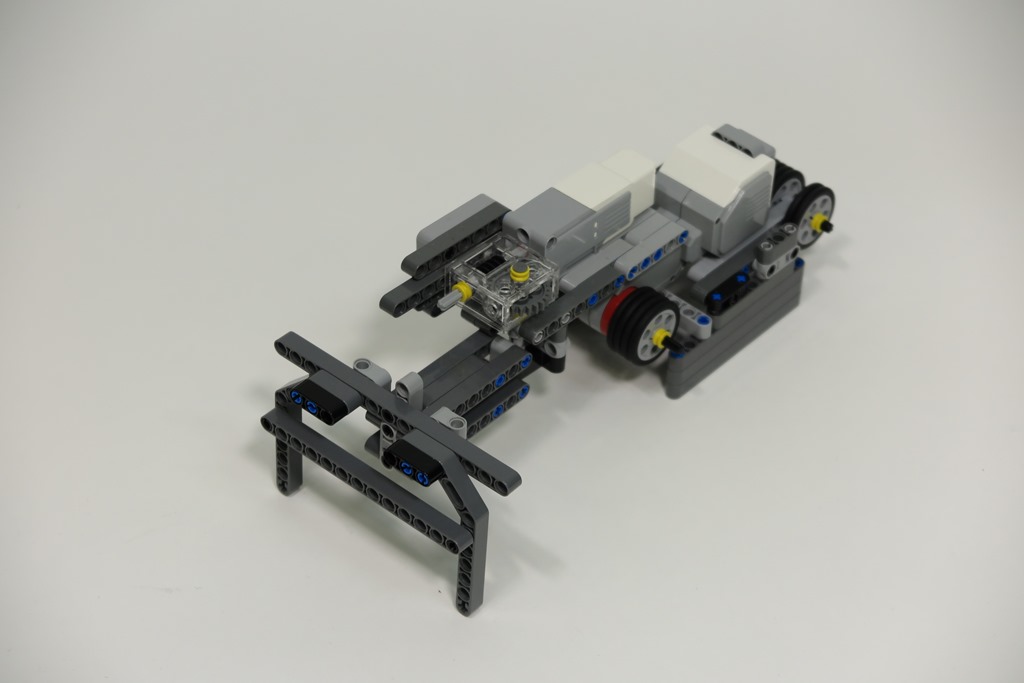
Fig. 5
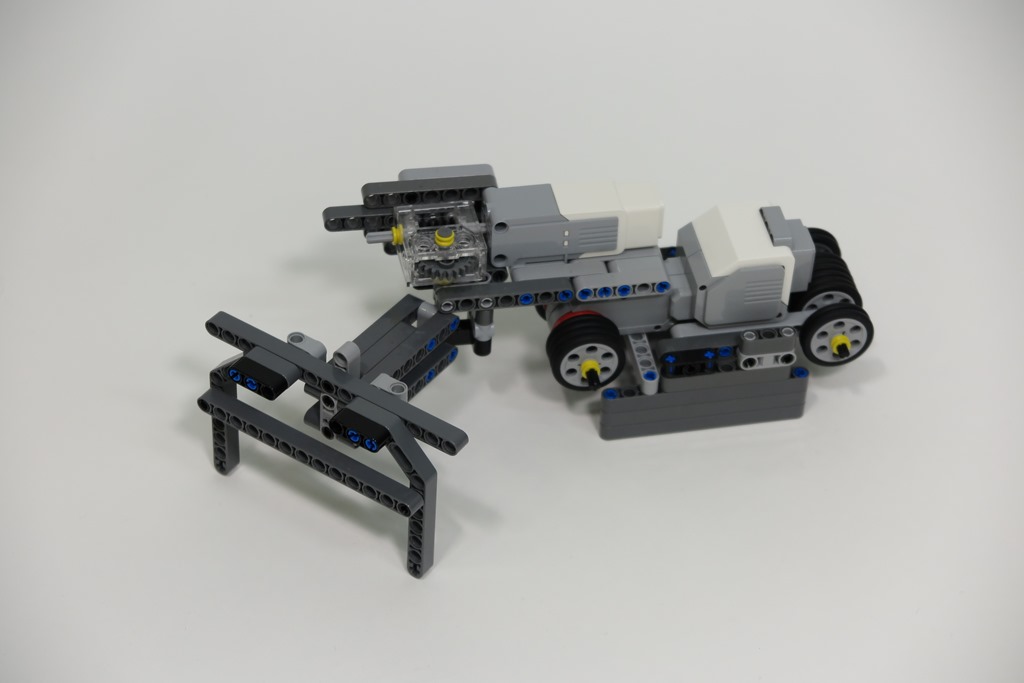
Fig. 6
- カメラ運搬ロボット
ロボットの足回りの構造はレール屈曲ロボットと共通化した。 先端に両開きのハンドがついており、カメラをつかむことができる。(fig.7)両爪の動きは歯車によって同期されている。開閉することでカメラを落下させて、レールのカメラ設置部に投入する機構になっている。(fig.8, fig.9)
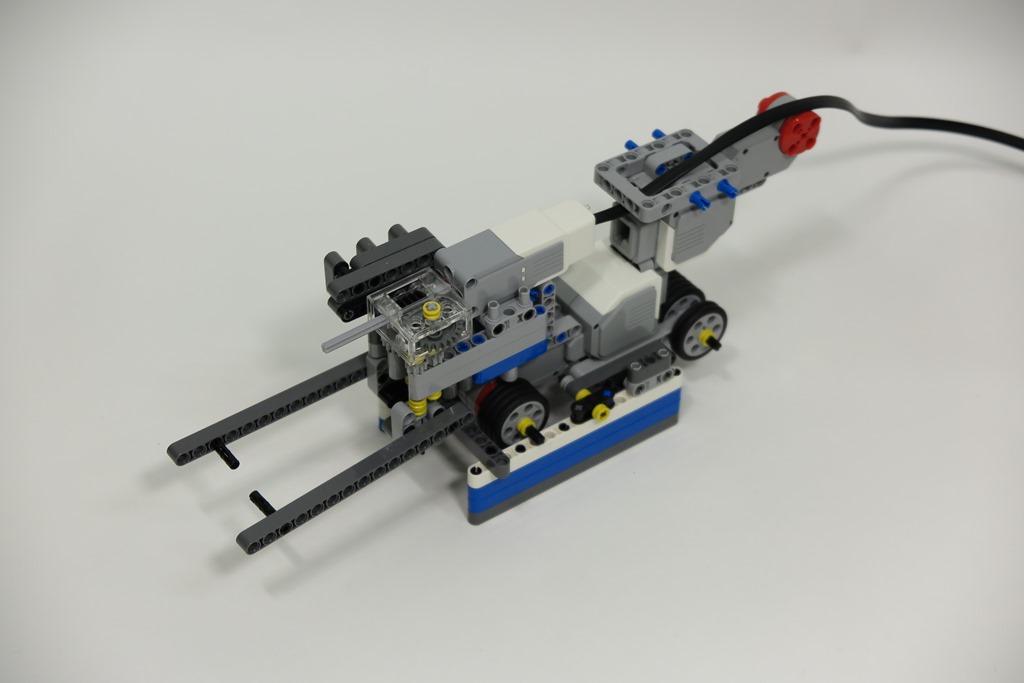
Fig. 7
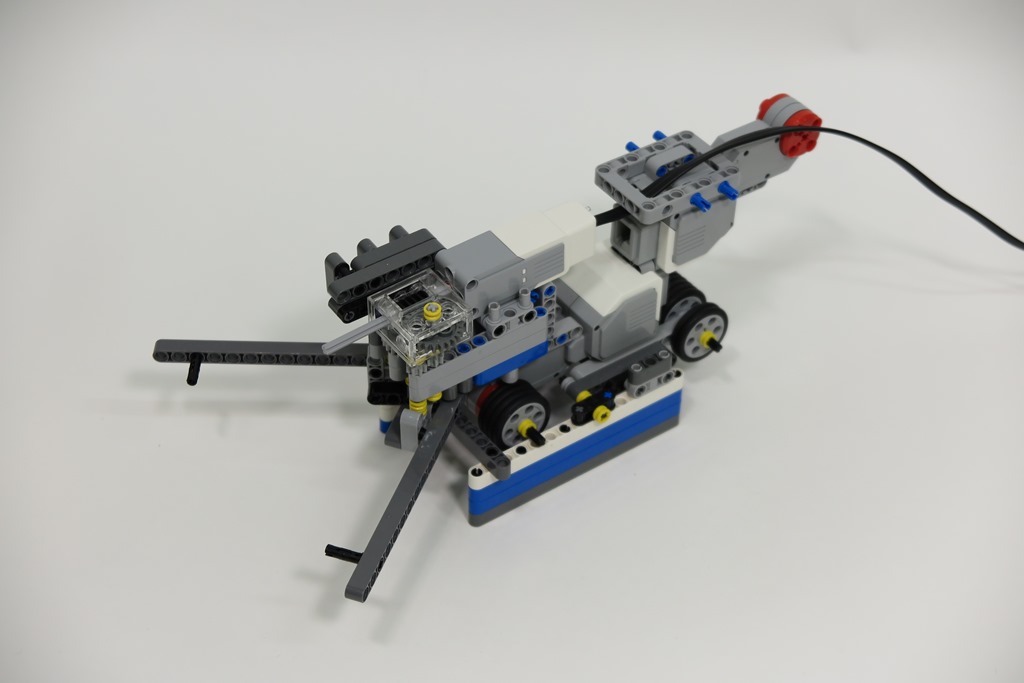
Fig. 8
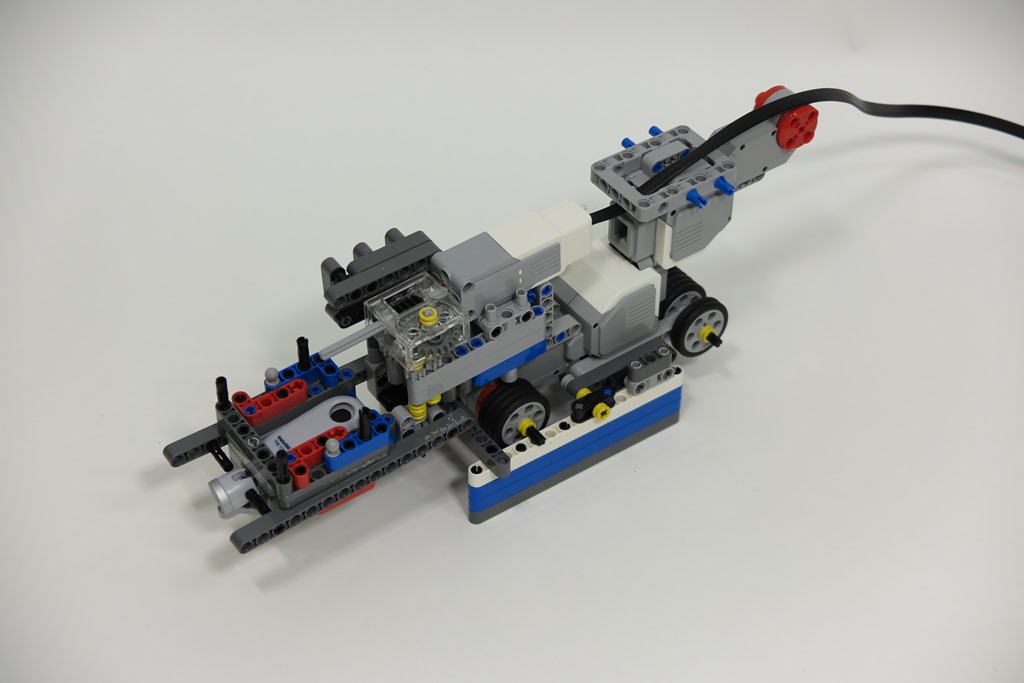
Fig. 9
機構における工夫点
- レール屈曲ロボット
関節部では歯車同士が噛み合って回るのではなく、レール屈曲ロボットによって加えられる荷重がある閾値を超えると、歯車が一歯数分ずれて、レールが左右に動くようにした。これにより、歯車がレールの左右の動きをロックする機構として働いている。(fig.10) レールの強度という観点では、当初レールの厚みはレゴパーツに換算して二個分しかなく、たわみやねじりが大きすぎるためにロボットが落下する事象が発生した。そこで、断面二次モーメントは高さの三乗に比例することから、レゴパーツ四個分の厚みを確保し、たわみを減少させた。 - ロボット二台の足回り機構
ガイドの幅は、カーブに対応するために、レールの幅より少し広くしている。 また、車輪がレールから脱落しないように、薄い円盤を重ねたローラーのようになっている。(fig.11) - レール屈曲ロボット
レールを曲げるのに必要なトルクを出すことと、出力軸の向きを変えるために、トルクの伝達にウォームギアを用いている。(fig.12) 爪の部分は、爪がレールから外れてしまうということがあったので、重くならないように、レールに負けない最低限の剛性を持たせている。 - カメラ運搬ロボット
歯飛びが起きないように軸受けの部分を、爪の動きを阻害しないように補強した。 カメラを持った際に重心が大きく偏ってしまうため、足回りの後部に重りをつけてバランスをとっている。(fig.13)
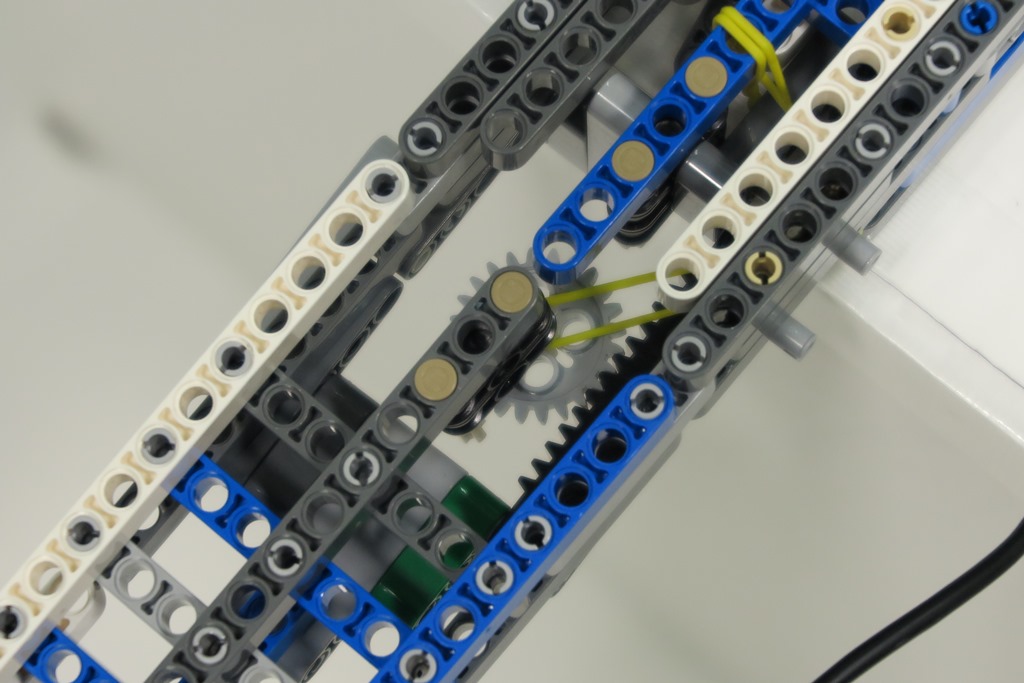
Fig. 10
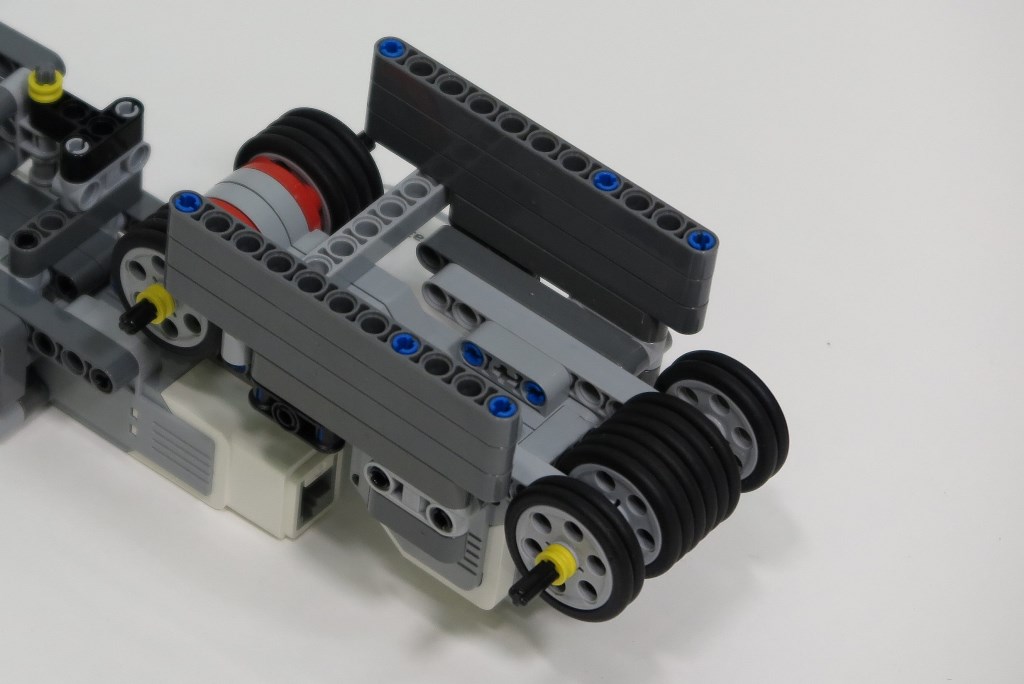
Fig. 11
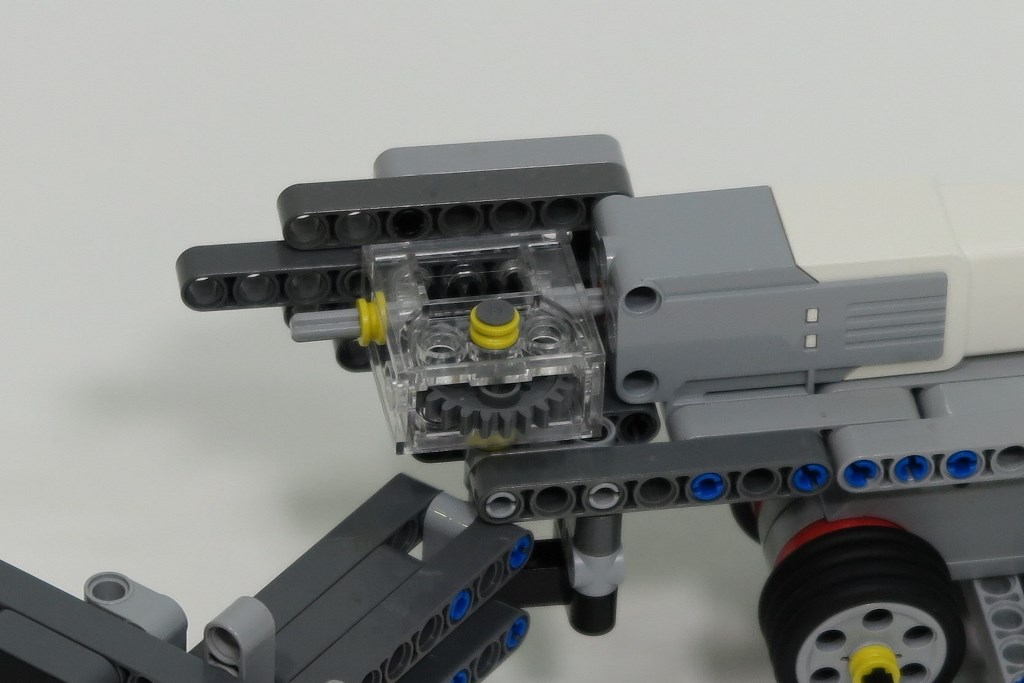
Fig. 12
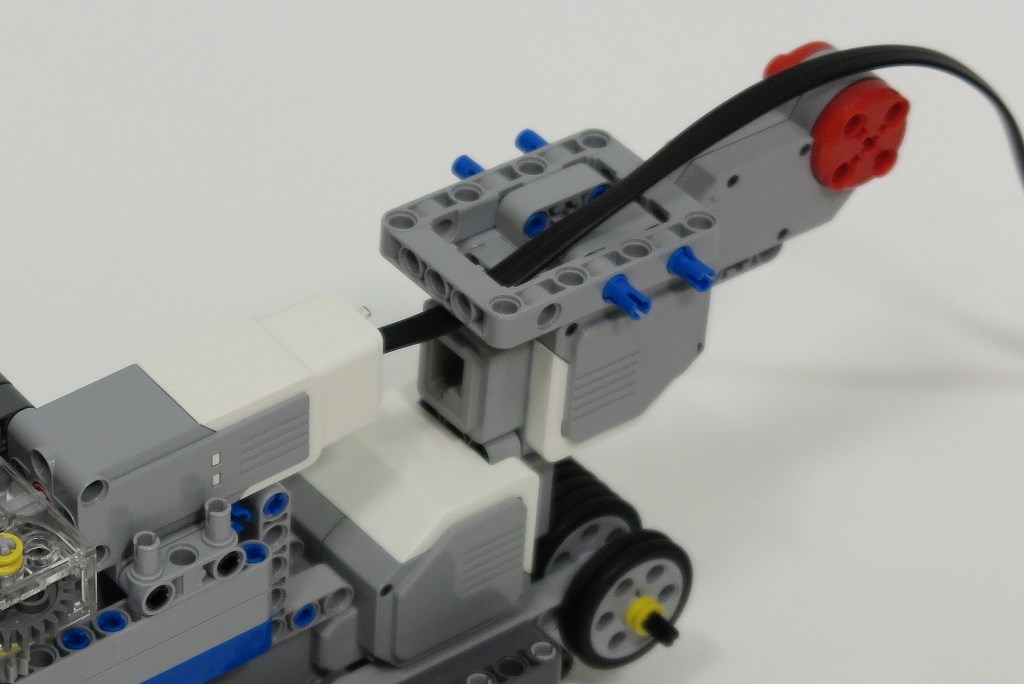
Fig. 13
製作結果とその分析
両ロボットとも、重くなってしまったため、レールに負荷がかかってしまっていた。
また、重心が高いことと、ガイドの幅などとの関係により、数回に一度レールからロボットが落下してしまうということが起こった。レールとロボットが互いに噛み合うようなガイド方式を作れば解決すると考えられたが、今回は解決に至らなかった。
ロボット操作法としては、ロボットの前後進とハンドの左右の動きのみを扱えばよく、操作性は良好だった。しかしながら、カメラの映像のみで格納容器内の状況や障害物との距離を把握する必要があり、操作する人の空間認識力を必要とした。
感想
レール関節部のロック機構をレゴで作る際、どの部品を組み合わせれば良いのかという課題が最後まで残ったが、先生に輪ゴムとレゴを組み合わせる機構を紹介していただき、解決できた。自重によるたわみの発生などにより、レゴで構造体の強度を出すことは難しかったが、逆説的に考えれば、より軽量で強度の高い構造を論理的に考え出す力を培う良い機会になった。(吉野)
レゴという、剛性の限られた部品を組み立てて、必要な剛性を持ったロボットを作ることが難しかった。また、可動部にトルクを伝達することも、限られたアクチュエータとレゴを用いてやるのが難しかった。限られた部品で、必要な機能を満たすものを作るということで、とても勉強になった。(後藤)
レゴという、剛性の限られた部品を組み立てて、必要な剛性を持ったロボットを作ることが難しかった。また、可動部にトルクを伝達することも、限られたアクチュエータとレゴを用いてやるのが難しかった。限られた部品で、必要な機能を満たすものを作るということで、とても勉強になった。(後藤)