
採用した戦略
今回の課題は瓦礫を模した模型を配管内(アクリルの筒)を通って運搬するロボットを製作するというものであった。
配管内は狭いかつ,円筒形をしているためこの中の走行は難易度が高いと考えた。
また,レゴマインドストームの仕様上1台のロボットに使えるモータの数に制限があるため, 2台のロボットに分けて課題を達成することにした。
まず,ロボットAで配管の外にある瓦礫を回収し, 配管の入り口でロボットBに瓦礫を受け渡し配管内を走行する。瓦礫は配管の入口に置いておくとその後の作業の邪魔になると考え, 瓦礫はロボットBが配管の外に設置した瓦礫置き場に持って行くことにした。
また,レゴマインドストームの仕様上1台のロボットに使えるモータの数に制限があるため, 2台のロボットに分けて課題を達成することにした。
まず,ロボットAで配管の外にある瓦礫を回収し, 配管の入り口でロボットBに瓦礫を受け渡し配管内を走行する。瓦礫は配管の入口に置いておくとその後の作業の邪魔になると考え, 瓦礫はロボットBが配管の外に設置した瓦礫置き場に持って行くことにした。
製作したロボットの概要
ロボットA (Fig. 1)
前方のベルトコンベアを縦にしたようなもの(fig2)で瓦礫を掻き込み, 車体中央にあるベルトコンベア(fig3)で車体後方に瓦礫を溜めておく。 そして,瓦礫を受け渡す際に車体後方にある門を開けることにより,溜め込んでいた瓦礫が出てきてロボットBに受け渡すことができる。 足回りのセンサにはジャイロセンサとカラーセンサを用いた。 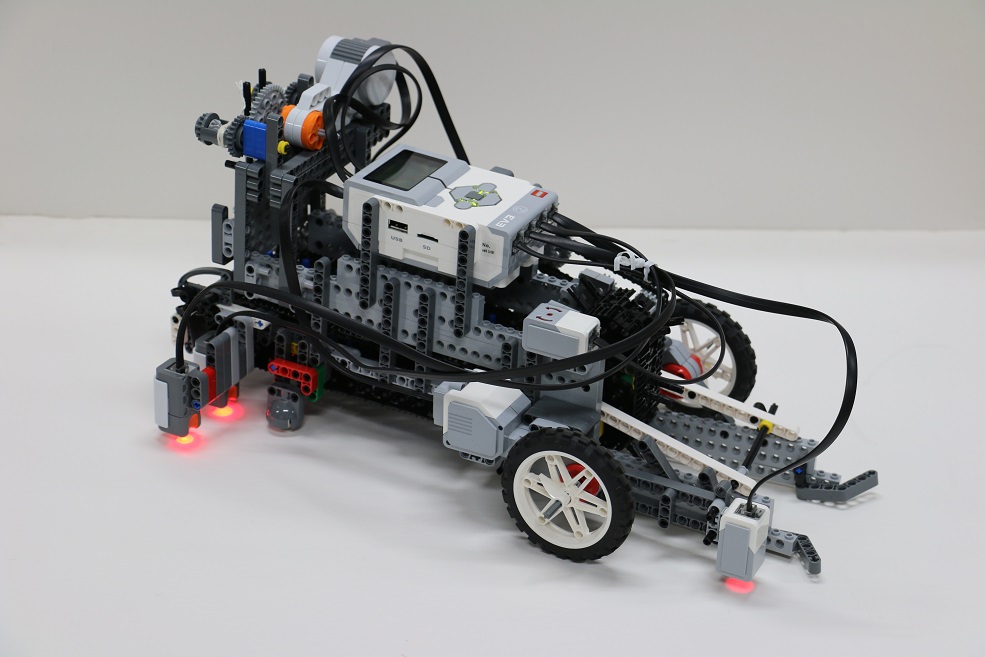
Fig. 1
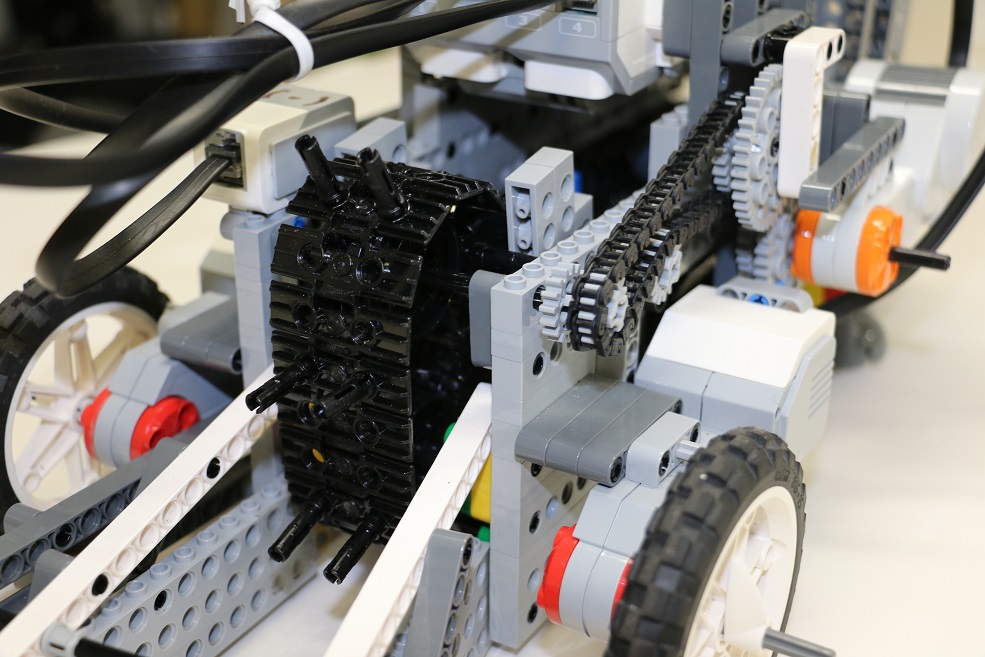
Fig. 2
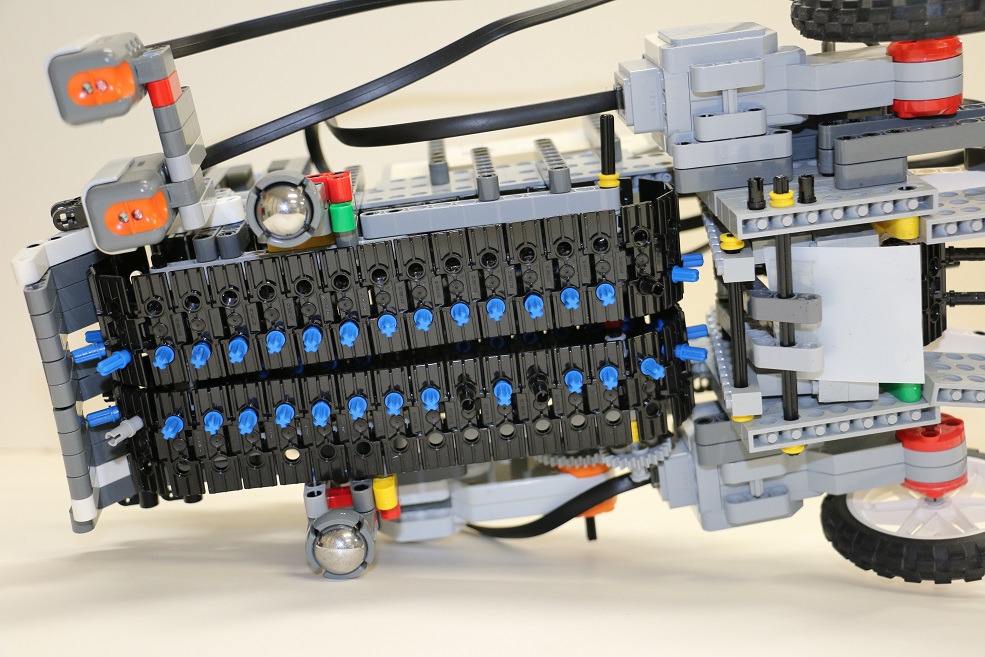
Fig. 3
ロボットB
車体前方にある瓦礫を溜めておく。そして,配管内をその状態で走行し,瓦礫置き場に来た際に中央のモータを動かし(fig4,5), 瓦礫をスロープ(fig6)を通し,瓦礫置き場にいれる。 なお,足回りのセンサにはカラーセンサを用いた。 
Fig. 4

Fig. 5

Fig. 6
機構における工夫点
ロボットA
ギヤとチェーンを用いて瓦礫を掻き込むところと後方に運ぶところを1つのモータで動かすことができた。 また,瓦礫が掻き込むところに瓦礫が引っかかりやすかったので,ベルトコンベアの突起(fig2)の長さを調整したり, 地面と接するところにクリアファイルを切ったものをつけたりして引っかかりにくくした。ロボットB
Fig6のようにキャスタを複数用意し,配管内と平坦な地面の両方を安定して走行し,地面から配管内の段差もスムーズに乗り越えることができた。製作結果とその分析
ロボットAは製作当初よりは瓦礫が引っかかることが少なくなったものの,依然として引っかかることがあった。
また,瓦礫が転がりやすく,またロボットの掻き込む口のところも狭かったためあまり多くの瓦礫を回収することができなかった。
また,機構的な問題で瓦礫の受け渡しもうまくいかず,こぼしてしまい回収した瓦礫をすべて受け渡すことができなかった。
また,ロボットAの走行時にジャイロセンサの誤差が蓄積されてしまい,複数回回収と受け渡しをすることができなかった。
また,フィールドに赤いテープを正方形に貼り,ロボットに搭載されたカラーセンサがそのテープを見るまで前進し,テープを見た後後退をし,
少し回転してからまた前進するという走行ルートをロボットAは取ったが,後退する際に車体で瓦礫をどかし,
フィールド外に出してしまうことがあり,他の走行ルートを試してみたかったが,時間がなく試すことができなかった。
感想
レゴのマインドストームを触ることは初めてだったので,
どうレゴを組んでいくのかなどわからないことが多く,難しかったものの製作は楽しかった。
2台の連携部や掻き込むところを発表までに完璧なところまで修正することができなくて残念だったが,
マインドストームで製作からロボットの制御まですることができていい経験になった。