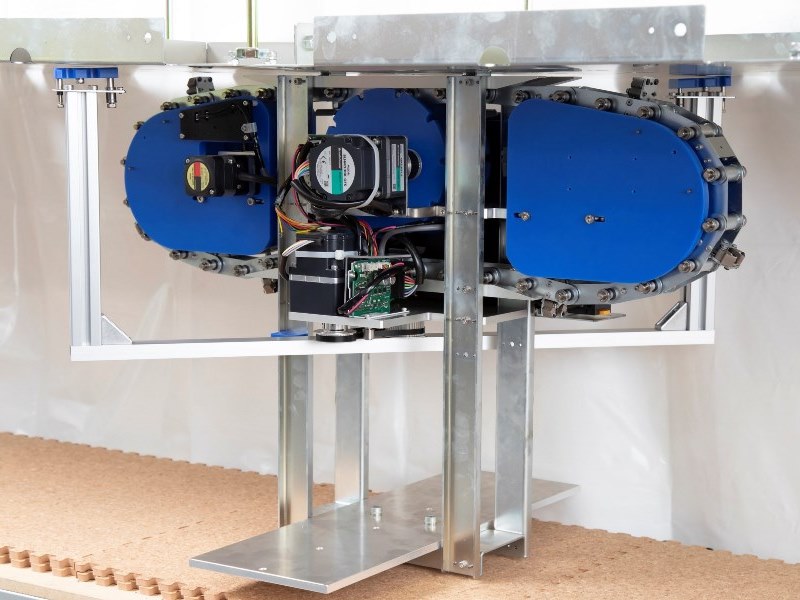
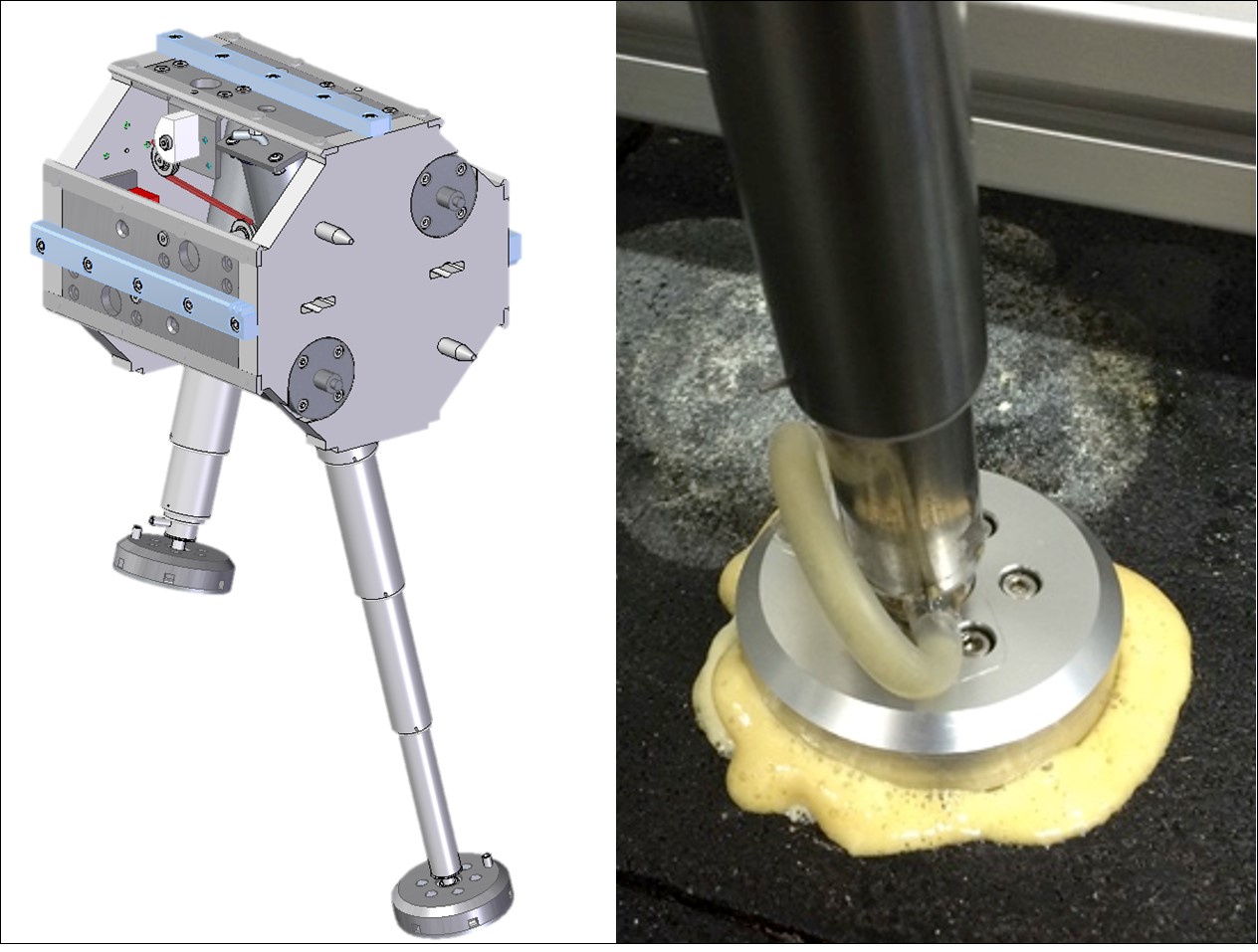
発泡樹脂で脚柱を展開・接地・固定する軌道構造体支持機構の開発
我々の研究グループでは人が立ち入るのが困難な環境において,モジュール化されたロボット移動・作業用軌道構造体の自動構築システムを開発しています.軌道構造体を適切に施工するためには,床壁面に対して軌道構造体を支える支持機構が必要となります.この支持機構では、発泡樹脂にアクチュエータ・接着剤・構造材の機能を持たせることによって,省スペースながら簡易的に構造体を支持することを可能としています。
坑内掘り鉱山における機能分散システム
近年増加しつつある坑内掘り採掘法ではLHD (Load-Haul-Dump)と呼ばれる鉱山機械が用いられています.本研究では,このLHDの掘削・積込機能と運搬機能を異なる車両に搭載する分散システム及びその分散システムに適した坑道の形状・設定を明らかにすることを目指しています.この目的を達成するために,分散システムの生産性を評価する生産性シミュレーション環境を構築しました.シミュレーション環境を用いた解析によって,分散システムの生産性に影響を及ぼす車両の性能について明らかにし,また提案する分散システムがLHDと比較して非常に高い生産性のポテンシャルを有することを明らかにしました.
熟練オペレータを模倣した鉱石自動掘削機械
資源開発の現場は過酷で危険な環境が多いため掘削機械を操作するオペレータが不在でも作業を行える自動掘削機械が求められています.高い生産性を有する地山の自動掘削を実現するには,地山状態を認識し,適切な掘削動作を行う必要があります.本研究では,オペレータが地山状態に応じて掘削動作を変えて作業を行っていることに注目し,地山状態とオペレータ操作した掘削動作の履歴を学習データとして集め,自動化時は地山状態に応じた掘削動作を学習データの中から選ぶというオペレータ模倣型自動掘削手法を提案しています.また,その構成要素である地山状態の認識手法,掘削動作選択手法を開発してきました.スケールモデルを用いた実験により,提案する手法を用いることで,オペレータが操作するのと同等の生産性を有する自動掘削が実現されました.
★本研究に関して,以下の特許を取得しています.ご活用頂ける企業を募集しています.掘削機械,掘削機械の制御方法および掘削システム,特願2015-004358.
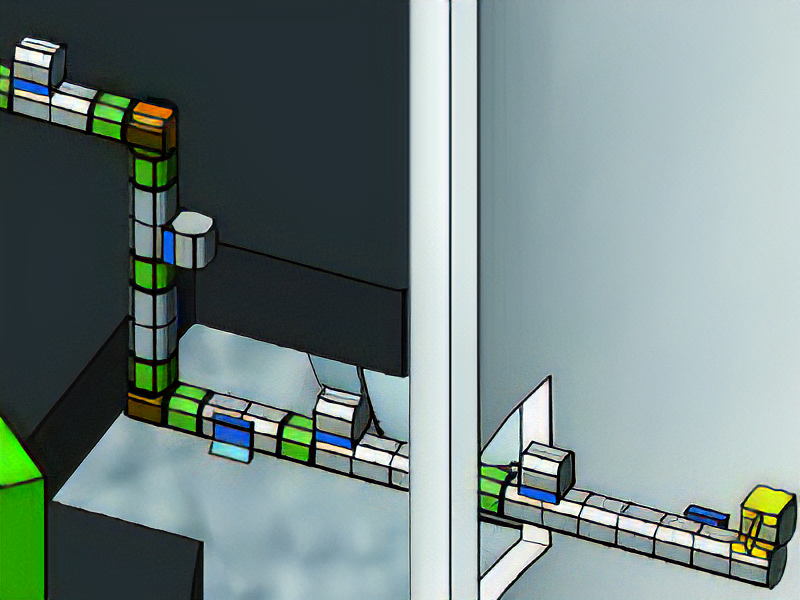
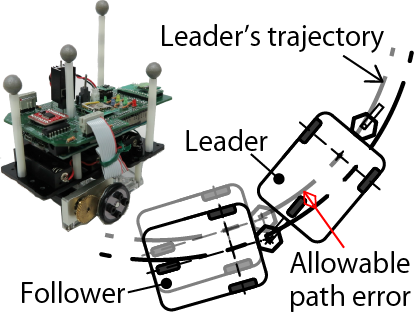
坑内自動運搬車両のための壁面接触を利用した高速走行法
坑内掘り鉱山では従業員の安全確保及び人件費の削減のために自動走行車両が求められています.また鉱石運搬車両ではそれに加えて,生産効率向上のために高速自動走行が求められます.我々の研究グループでは狭いトンネル内を高速で自動走行する車両として,左右に取り付けたローラバンパで壁面に接触し,壁面を方向転換に活用する車両を研究しています.トンネル内の壁は平らではなく,大きな凹凸は避けなければ車両が壊れてしまいます.そこで,距離センサで前方の壁を観察することによって凹凸を検出し,大きな凹凸との衝突を回避する制御の開発を行っています.
Diesel Particulate Filter (DPF)内部のリアルタイム広範囲観察
ディーゼルエンジンの排ガスに含まれるParticulate Matter(PM)は呼吸器疾患への影響があることが確認されており,排ガス中のPM捕集のためDiesel Particulate Filter(DPF)が用いられています.本研究では,DPF内部の挙動観察のため,DPF内部をリアルタイムかつ広範囲に観察可能な可視化加工を開発しました.市場で用いられているエンジンとDPFを用い,PM堆積層の剥離崩落及びそれに伴うDPF内の流路閉塞等の観察に成功しています.
★本研究でASME ICE Division Best Paper Award 2016を受賞しました.
圧電素子で押付け力を制御する高効率トラクションドライブの研究
電気自動車の騒音問題解決のため,トラクションドライブに注目が集まっています.トラクションドライブは押付けられた2つのローラで構成されます.ローラの接触による高圧で油はガラス状となり,トルクを伝えますが,ローラ同士を強く押付けるため,低効率であると言われています.この効率向上のため,押付け力を運転状態に合わせ調整する必要があります.本研究では,圧電素子を用いて押付け力調整を行うことを提案しました.圧電素子は電圧により変形するアクチュエータで,大発生力であるが変位が小さく,低剛性の力センサとの併用は望ましくありません.そこで,力計測を行わずに,すべりを計測しローラの運転状態を観測し,押付け力を制御する手法を開発しました.二つの円筒の試験機を製作し,すべりを観察した押付け力制御による効率向上を検証しました.
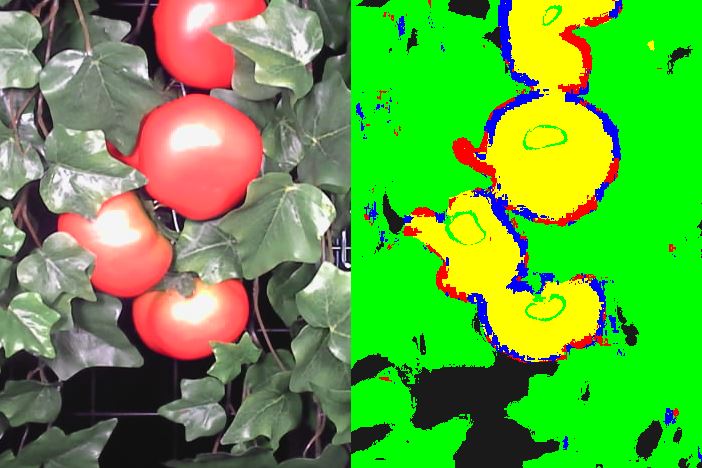
天井移動型ロボットが撮影したトマト栽培棚画像を用いた果実体積推定
近年,農作業従事者の高齢化と農業人口の減少が問題となっています.この問題の解決に農作業の自動化が求められていますが,そのためには作物に対する詳細な生育データの取得が必要です.本研究では重要な生育データの1つであるトマト果実体積の生長計測のために,生長途中の果実を撮影し画像から体積を推定する手法の開発を行っています.課題としては,栽培中の果実は葉によって一部が隠れていることが多いが挙げられます.本研究ではRGBカメラに加えて距離センサを用いることで隠れの度合いを評価します.具体的には画像を果実領域,葉領域,葉により隠れている果実領域などに分別します.分別された領域の画素数から果実体積を回帰により推定することで,隠れに頑健な体積の推定を目指しましました.開発した手法をトマト果実・葉の模型および実際の圃場で取得した画像に適用し,その有効性を検証しました.
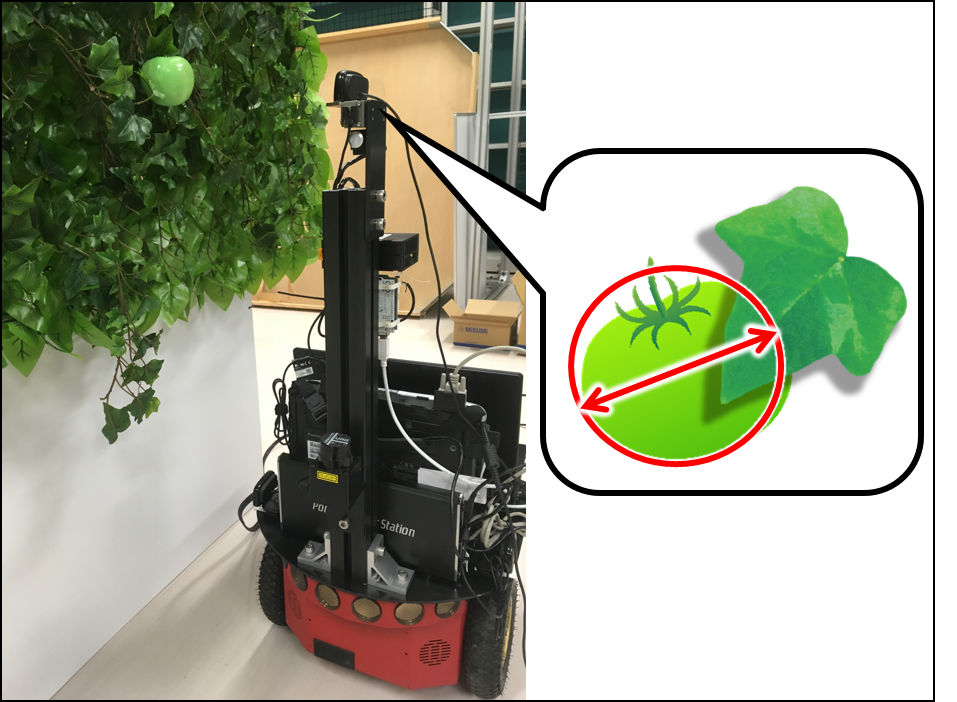
最適な観察位置を自律探索するトマト果実体積推定ロボットの開発
近年の日本の農業分野では、熟練農家のノウハウのビッグデータ化に注目が集まっています。中でもトマト栽培では、生育途中でまだ緑色の未成熟果実の大きさのデータ収集が重要とされています。そこで私たちは適した観察位置を自律探索するトマト観察ロボットを開発しました。この地上走行型ロボットは、トマト圃場を巡回しながらモニタリングし果実を検出します。検出した果実に対してステレオカメラで果実の3次元点群を取得し、生成した果実点群を処理することで果実幅を推定します。さらに、観察結果をその場で評価してデータの取捨選択や位置を変えて再観察することで、取得するデータの質を向上させる枠組みを実現しました。
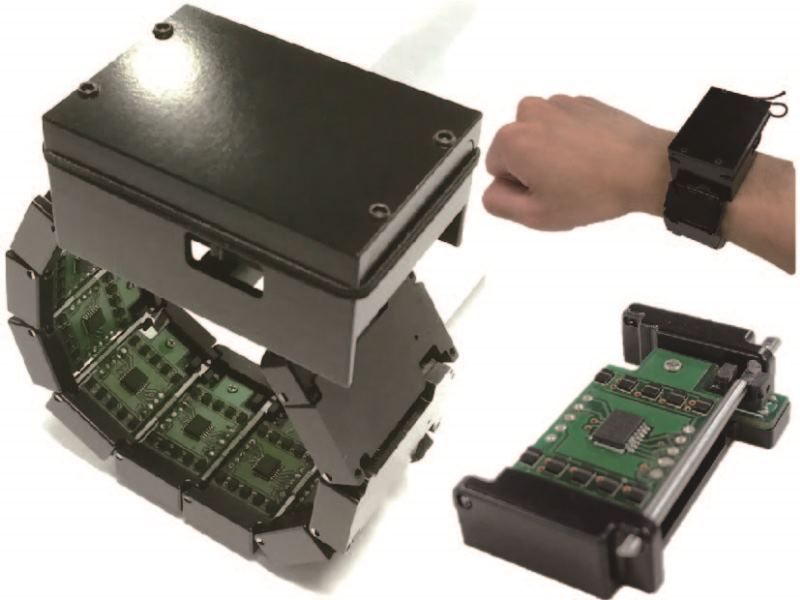
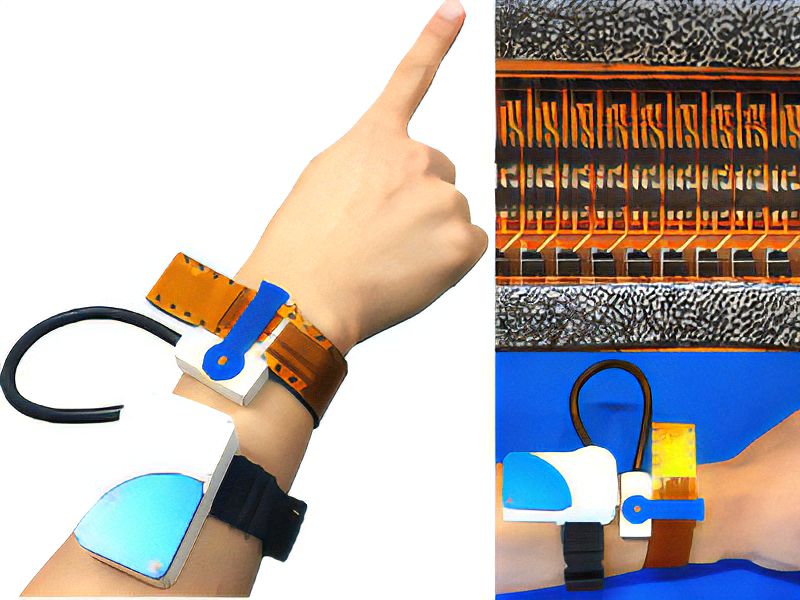
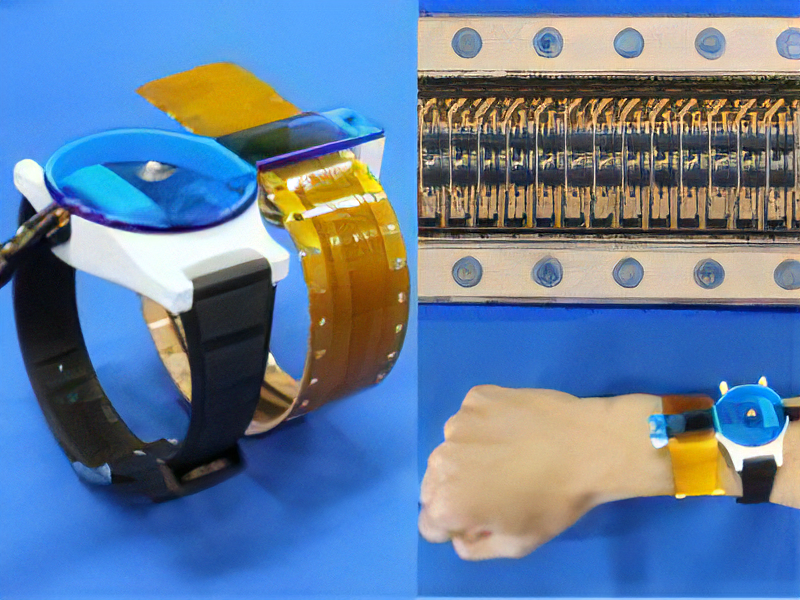
装着型手首凹凸計測デバイスを用いた手指ジェスチャによる画面操作に関する研究
近年急速に普及しているスマートフォンを始め,人の動作を用いて直感的に操作をすることのできるジェスチャインタフェースの開発が盛んになっています.本研究では,手話を始めとする手指ジェスチャが多彩な情報を表現できるという点に着目し,webブラウジングを始めとした画面操作においてユーザビリティの高い,日常的に用いられるインタフェースの実現を目標としました.先行研究において提案された,回内を許容する装着型手首凹凸計測デバイスをベースとして,使いやすさを考慮してデバイスを改良し,これを用いて手指ジェスチャを認識・活用する画面操作インタフェースを複数作成しました.これらのインタフェースについてユーザビリティテストを行うことで,ユーザビリティの高い画面操作インタフェースとはどのようなものであるかを検証しました.
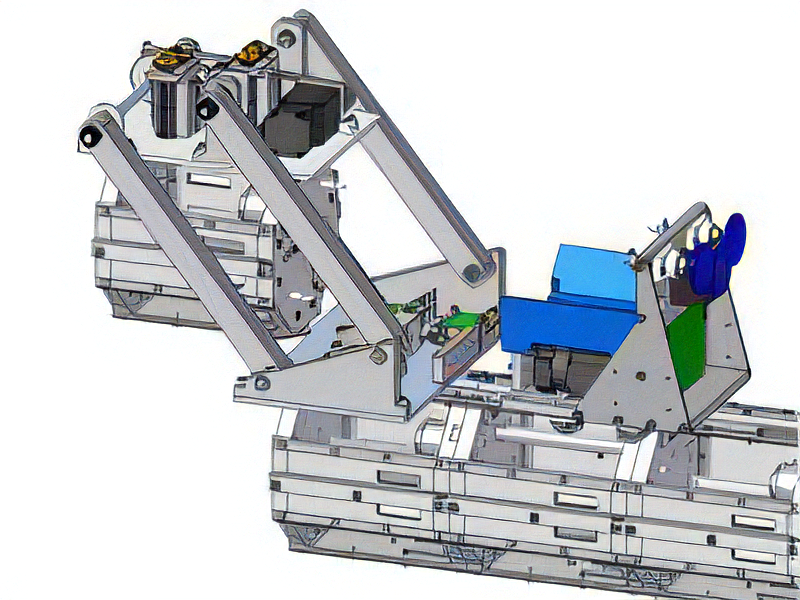
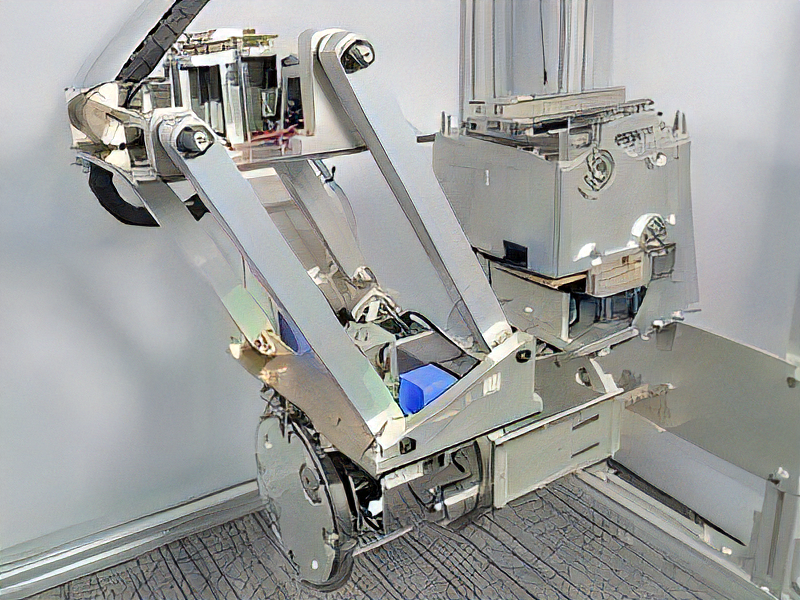
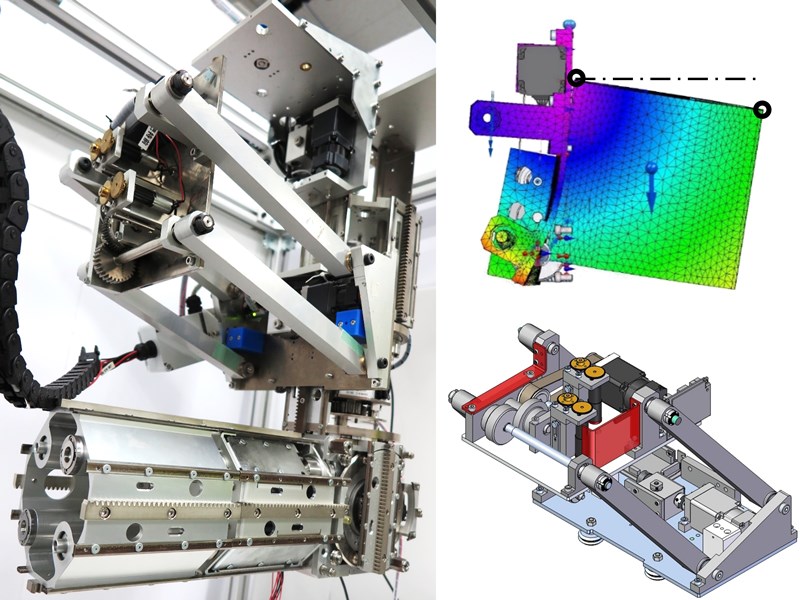
HangBot: パンチングメタルへの機械的拘束を利用した天井移動ロボット
大きな荷重を支持しつつ天井を自由に移動可能なロボットの実現を目指して,建築素材として注目されているパンチングメタルを天井面として活用し,その穴に機構を挿入して掴み変えながら天井移動をするロボットを開発しています.このロボットの実現のために,(1)パンチングメタル天井に懸架するための天井懸架機構,(2)尺取虫型移動の水平移動機構,(3)水平移動速度を平滑化し,荷重の負荷状態を理想的な状態にするパンタグラフ機構を開発しました.また本ロボットを実現するにあたって構築した天井懸架方式は特許化のためにPCT出願しております.現在,このロボットの移動速度向上及び機構の簡素化などの課題に取り組み研究を進めています.
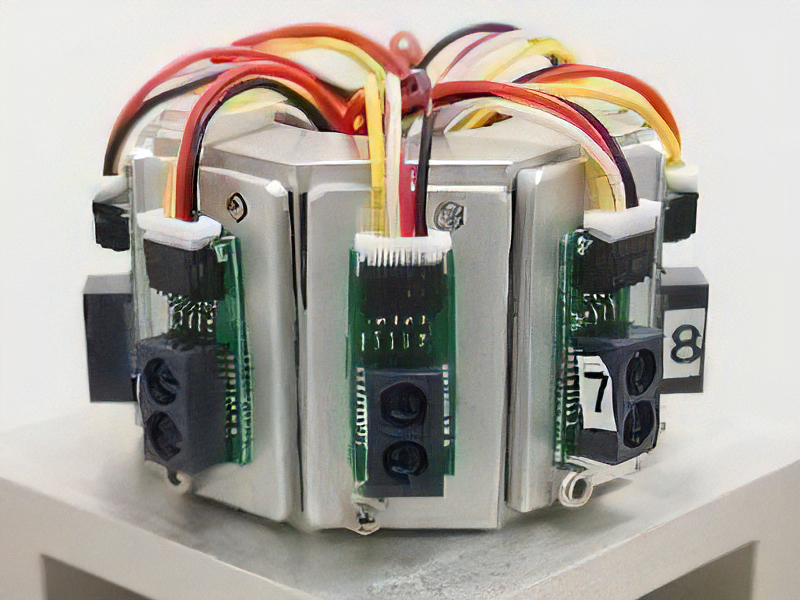
安価で日常的に利用可能な歩行能力推定システム
歩行能力は高齢者の健康度を知る上で重要な指標とされています.しかし,従来は歩行能力を測定するには高齢者が医療施設に出向くか,介護士が高齢者宅を訪問するなど大きな人的コストを必要とし,日常的に気軽に測定を行うのは困難でした.そこで本研究では,高齢者が普段の生活の中で簡便に歩行能力を測定できる方法として,高齢者宅に導入容易なデバイスから歩行能力を推定する枠組みを提案しました.デバイスはアレイ状に並べた距離センサで構成されており,人間がデバイスに沿って歩行した際の各センサの出力を解析することで歩行能力の基本パラメータである歩行速度と歩幅を推定します.実際に高齢者を対象とし,推定性能評価実験を行い,0.48~1.05m/sの歩行速度で平均相対誤差6.7%,0.29~0.58mの歩幅で平均相対誤差3.9%の推定が可能であることが分かりました.
CFloor: 生活空間における人位置検出用静電容量型床センサシステム
生活空間において人の位置を検出することを目的とし,低コスト,導入が容易,メンテナンスが不要となる静電容量型床センサシステムの開発を行っています.試作したシステムは非常に簡素な電子部品より構成されているため安価であり,またモジュール化により任意の面積仕様に容易に拡張することが出来るのが特徴です.本センサの人検知特性を実験により把握し,さらに簡単な認識・フィルタ処理でも高い精度で人の位置を検出可能であることが分かっています.
家庭内物流支援ロボットシステム
産業・経済が発展するに伴い,人の生活空間はモノ・情報で溢れるようになってしまいました.家庭内物流支援ロボットシステムはこのモノ溢れの問題に対して IT(情報技術)とRT(ロボット技術)を駆使し,新しい生活空間のカタチを提案します.本ロボットシステムのコア技術は物品の収納用具であるコンテナケースを知能化もしくはロボット化した, インテリジェントコンテナ(iコンテナ)をシステムの中核として設置したことにあります.このiコンテナを通じて人とロボットは物品のやり取りをし,このiコンテナが自ら収納された物品情報を取得し蓄積することで永遠に消えることのない物品収納情報を我々に与えてくれます.またこのコンテナを運搬するための天井移動型コンテナ運搬ロボット,コンテナ運搬ロボットと連携し空間効率高く自動収納・取り出しを行える家庭用コンテナ自動収納庫,そして個別の部屋において本物流(収納)システムへのアクセスポイントとなるiDockなどから本システムは構成されます.これらの構成要素により柔軟かつロバストな物品収納を実現する近未来の住宅環境を提案します.
インテリジェントコンテナ
インテリジェントコンテナ(iコンテナ)は家庭内物流支援ロボットシステムにおいて,人・ロボット間における物品のやり取りの仲介を行う存在であり,本システムのコア要素であると言えます.これまでロボットが個別の物品をハンドリングする研究がたくさん取り組まれ,大きな成果を出してきました.特に工場の組み立て作業などでは,高い品質の製品を大量に生産するためには1つ1つの部品を精度高く組み上げていく技術が求められています.一方,部屋の中で片付けを行うロボットにとって1つ1つの物品をハンドリングする作業は大きな負担であり,最終目標である整理・整頓された空間にたどり着くまでにはまだまだ多くの課題を解決しなければなりません.そこでこのiコンテナは部屋の片付けという目標に特化し,それを促す機能を搭載することでロボットの能力を補い,さらに人の行動を促す機能を有しています.具体的には物品に取り付けられたRFIDタグを読み込み,それを蓄積・転送・表示する機能.また,ロボットがコンテナをハンドリングしやすいように計測を補助したり物理的にガイドする機能が搭載されています.また収納するだけのコンテナケースだけでなく,自身に温度管理機能が内蔵された冷蔵庫コンテ,DVD再生機能などを搭載した机上環境コンテナそして歯磨きや手洗いを補助する洗面環境コンテナなどのバリエーションを開発することで,更にインテリジェントな(知能化された)空間の実現を目指しています.
天井移動型コンテナ運搬ロボット
天井移動型コンテナ運搬ロボットは生活空間において人との干渉が少なく,またコンテナをロバストにハンドリング(運搬)することを目標として開発されたロボットです.生活空間内の床には家具やその他の物品が散乱していることがしばしばで,ロボットがそれらの障害物を回避しながら移動する高い経路計画技術が求められます.また日本の一般的な住居の廊下は一人の人間が通過する程度の幅しか設けられておらず,人とロボットがすれ違うためには空間が不足しています.上記のような問題に対して,そもそも人が使用していない天井をロボットが使用するというアプローチを取ることで1つの解決策を導き出すことが出来ます. また,生活環境中には様々な外乱要素があり,計測・制御ともにロボットが動作する理想的な環境とはかけ離れた状態であることがしばしばです.そこで本コンテナ運搬ロボットには外乱を吸収するような柔軟な機構(コンプライアント機構)が実装されています.従来の高い剛性を有したロボットマニピュレータでは実現出来ない,高い環境適応能力が生活環境における外乱を克服し,ロバストなコンテナ操作を実現します.また,機械的な柔軟性は万が一,人とロボットが接触したような場合にも人を傷つけないという意味でも有効に働きます.
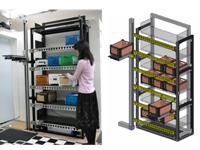
家庭用コンテナ自動収納庫
家庭用コンテナ自動収納庫は生活環境の中でiコンテナを空間効率良く収納し,また他のロボットと連携しながら自動で収納や取り出しを行う自動装置です.従来の産業用自動収納庫はその動作効率(速度)を重視するために,安全柵などを用いて動作領域から人間を排除する傾向がありました,しかし家庭用の自動収納庫では人の生活空間やスタイルを侵害しない,高い共棲能力が求められます.そこで本自動収納庫ではまず垂直動作と水平動作を分離することにより,空間内で動作する装置の大きさを小型化しました.これにより非動作時における退避モードが可能となり,一見すると普通の収納棚と変わらない見た目になります.一方,人が収納されたコンテナをロボットがロバスト(堅実)に操作するのは容易なことではありません.そこで囲い(ケージング)と呼ばれる柔らかなハンドリング戦略を用いることで,人間のラフな動作にも対応してロバストにコンテナの収納・取り出し動作が実現されるようになっています.
コンテナ中継装置iDock
中継装置iDockは各部屋から家庭内物流支援ロボットシステムにアクセスするためのアクセスポイントとなる装置です.通常はコンパクトモードになっており,人の生活空間を侵害しないようになっていますが必要に応じて装置を稼動させます.
ユーザは収納して欲しいiコンテナをiDock上に設置することによって,自動でコンテナ内のRFIDを読み取る装置が動き始め,内容物に応じて収納場所(アクセスしやすい場所への収納か長期間保存する収納か,または収納しないという選択もある)が決定されます.
そしてiDockには天井移動型コンテナ運搬ロボットとのスムーズなコンテナ受渡しを実現するためのガイド機能が実現されており,これによってコンテナ運搬ロボットのコンテナハンドリング性能(時間・成功率)が飛躍的に向上します.
またコンテナに収納された物品に貼り付けられたRFIDを読み取るアンテナは特殊な稼動装置が用意されており,これによって物品のコンテナ内における位置・姿勢によらずロバストに内容物を認識することが可能となっている点も本装置の特徴です.
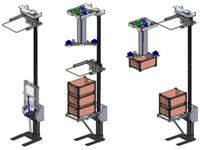
電気駆動に拡張可能な店舗・家庭用手動操作型スタッカークレーン
店舗・家庭用スタッカークレーンは,生活空間において高所を収納空間として利用するためのツールです. スタッカークレーンとはコンテナを運搬する搬送機器で,本研究ではセンサ・アクチュエータの機能の一部を人間に代替させることで,装置の複雑さを回避して価格を抑えて導入しやすいものにすることを狙っています.この装置の特徴は以下に示す3点です.
(1)従来の棚という既成概念をなくし金具を用いてコンテナを直接壁に取り付けるという新しい収納手法を採用しています.
(2)T字型に張ったタイミングベルトに対して2箇所のブレーキを切り替えることで単一の機構で2自由度の駆動が可能な機構を開発しました.これは手動操作機械の場合ユーザは床面から離れることはできないので,必然的に3自由度駆動のうちコンテナの収納空間への挿入と昇降の2自由度は互いに強く拘束されるために必要になるものです.
(3) 電気電子部品を後付けし,同一の機構で電動機械に拡張することを可能にしました.
TansuBot: 物品探索を支援する知能化ストッカ
知能化ストッカは家庭内での物探しを支援するための,引き出し型小物収納システムです.各引き出しに開閉認識用スイッチとLEDが付いており,棚裏面に移動式カメラとポップアップ(引き出しの押し出し)機能を搭載した壁面移動ロボットが付いています.スイッチからは各引き出しの開閉履歴を,移動式カメラからは各引き出しの内容物の画像を取得します.これらの情報を利用して,ユーザは端末上で内容物を画像検索したり,探したい物品が入っている引き出しの候補を絞り込んでLEDやポップアップにより提示することができるようになります.これによりユーザの物品探索時間が短縮されることが見込まれます.収納としての効率を損なわないために,ロボットの移動スペースをなるべく小さくする工夫を施しました.また,コストや質感の面で,家庭に導入しやすい装置とするために,棚や移動機構のレールなど,主要な素材に木材を利用した機構設計を試みました.
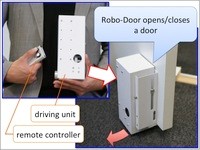
人の生活支援とロボットの作業環境構築を目的とした後付型ドア自動開閉装置
Robo-Doorは,車輪による駆動方式を採用した後付型のドア自動開閉装置です.ドアの開閉は,一般家庭に導入されるロボットが部屋間を移動してサービスを提供する際に解決すべき問題の一つですが,それ自体が研究の対象になるほど難易度の高いタスクです.また,アームを持たないロボット,例えばRoombaのような単機能ロボットでは,ロボット自身でのドア開閉は現実的ではありません.そこで,ドアを自動開閉する装置を環境側に埋め込んでおくことで,ロボットの作業遂行性の向上およびロボットシステムの人間生活環境への導入促進が期待できます.加えてRobo-Doorは,例えば車いす使用者など自力でのドア開閉が容易でない人への生活支援としても利用できます.Robo-Doorは駆動方式として車輪を採用していますが,これには機構のシンプルさに加え,取り付け方向を変えるだけで開き戸・引き戸の両方に対応できるという利点があります.また,ドアや壁に穴開け等の加工が必要ない取り付け方法を実現しており,これは既存の製品には無い特徴と言えます.
安心安全省エネのための既存家電の消費電力監視・制御を実現する知能化電源タップの研究
家庭でいまごく普通に使われている家電機器のオン・オフ制御により,快適かつ安心安全省エネな環境を実現することを目標としています.そのためのデバイスとして既存家電の消費電力取得や制御を可能にするタップ型デバイス「知能化電源タップ(iTap)」を製作しました.知能化電源タップはシステムとユーザ双方からのオン・オフ切換が可能で,取得した消費電力データやユーザの操作を無線でホストPCへ送信することで,消費電力等のデータの蓄積が可能になります.知能化電源タップ,焦電センサから得られるデータをホストPCが収集し,解析することで快適かつ安心安全省エネなサービスを実現します.それらのサービスの例として,(1)オン・オフの可否による機器のカテゴリ分類,(2)相関分析による自動オン・オフ制御,(3)消費電力の異常検知による自動オフ,の3つの手法を提案し,実験により人間の電力使用特性をモデリングした電力制御が可能であることを実証的に研究しています.
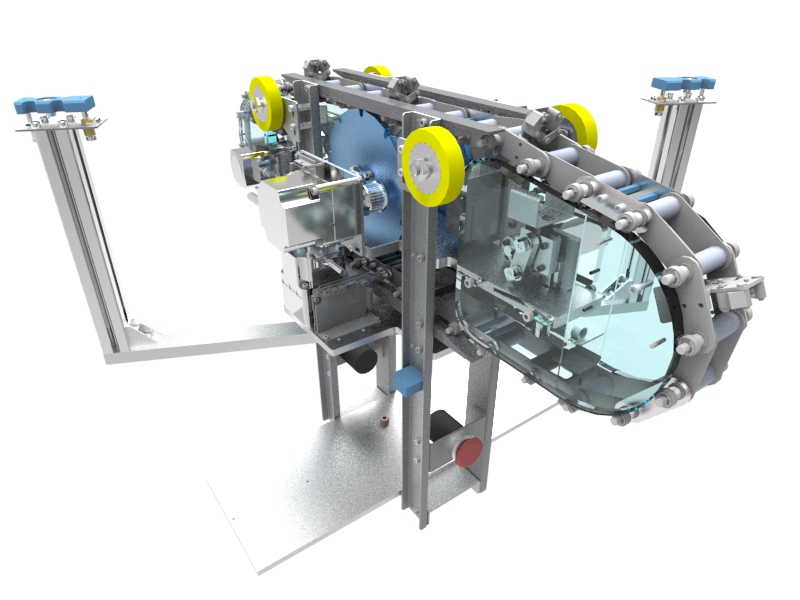
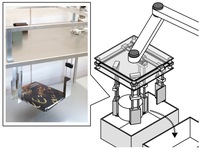
ケーシングによる物品操作のための分散型エンドエフェクタ
多品種少量の物体操作が必要とされる物流分野での使用や,家庭内物流支援ロボットシステムにおいてi コンテナ間の物品移し替えといったアプリケーションをターゲットとしたケージングマニピュレータの開発を行っています.
ケージングとは,”あそび”のある緩い幾何拘束により物体を囲い込み,物体が一定領域内から脱出できない状態に置くことを指します.このケージングを利用した物体操作には,物体と指の接触状態を保つ必要がないことと物体と指の間の摩擦に依存しないことから,簡単な位置制御のみで実現可能であるという利点があります.その一方で,任意の物体にケージングを形成する幾何拘束を配置する機構の複雑化と,それに伴うアクチュエータ数の増加が課題となります.
この課題に対し,構成要素が機能ごとに分離・分散化されている分散型エンドエフェクタを提案しています.人の手の”指”に相当する部分と,それを動かす”手のひら”に相当する部分(xyθアクチュエータ)を切り離した構成となっており,各指の移動を1つの構成要素が一括して行う事でエンドエフェクタ全体のアクチュエータ数削減を実現しています.
また,簡易形状の指を複数組み合わせて使用する事で様々な種類の物体を操作可能となります.
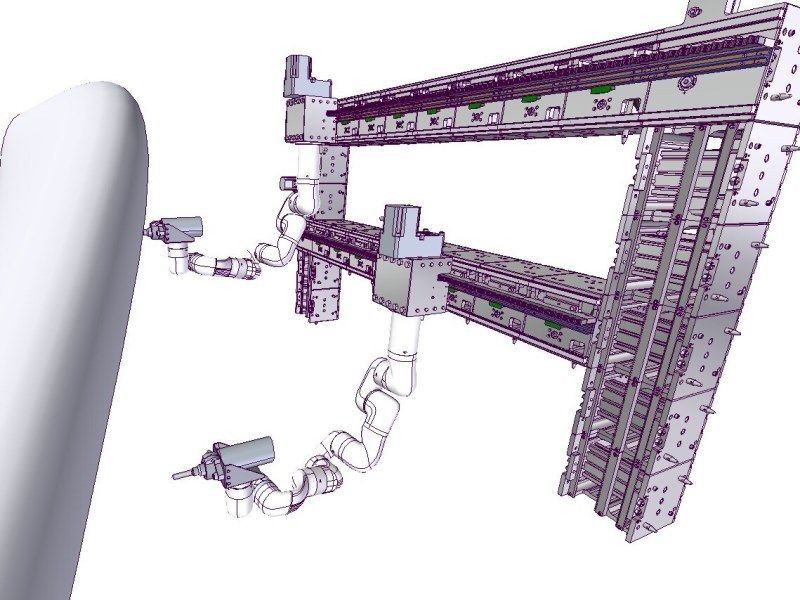
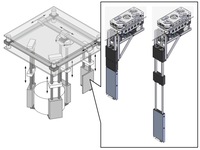
ケージングマニピュレータ用指モジュール群
分散型エンドエフェクタの指は,ケージングを形成する幾何拘束モジュールと,幾何拘束モジュールの上下動と水平移動をそれぞれ行うスライダモジュールと分散駆動モジュールの3つで構成されます.分散型エンドエフェクタでは,”手のひら”に相当するxyθアクチュエータによって指を物体側面に順次配置し,物体下に爪を挿入する事でケージングを形成します.コンテナ内等の限られた空間内における作業を想定しているため,指先には薄さが要求されます.また,複数の指を配備するため,1つの指に使用するアクチュエータ数の削減と指の軽量化が課題となります.
これらの課題に対し,指の水平移動だけでなく指先の上下動にもxyθアクチュエータからの入力を使用し,また指先の爪駆動機構を工夫する事で1つの指に使用するモータは1個,指先の薄さは10mmとなっています.加えて,左右非対称形状の採用と低消費電力ブレーキ機構による構成の最適化により,指の軽量化を実現しています.
最大ケージングマージンを用いたロバストなマニピュレーションプランニング
賢いデバイスを作るためには,精巧な機械設計だけでなく,周囲の環境を理解,操作する事が必要となります.ロボットがこの能力を有する上で,マニピュレーションプランニングのアルゴリズムがその役割を担います.プランニング研究の歴史は長く,広く行われていますが,ロボットの知覚と実現できる行動には隔たりが大きく,実用性を欠いたものとなっています.そのため,本研究では以下の二つの側面に重点を置きます.
第一に,ケージングにより物体を把持し,ロバスト性を保証するためにケージングマージンを最大化する点です.ケージングとは,籠の様に物体の周りを囲う事で物体が囲われた空間から脱出できないようにし,把持する手法です.しかし,フォームクロージャが形成されている事は保証されません.多数の指を用いれば,ケージングマニピュレーションのプランニングをし,指配置を決定する事は容易ですが,最小限の指でケージングを行うプランニングは困難であり,チャレンジングな問題です.本研究では複数のコンフィギュレーション空間によりこの課題を解決し,ヒューリスティックな手法を導入して解探索を高速化します.
第二に,カメラとデプスマップにより物体検知を行う点です.一つのセンサで物体情報を得るだけでは日常での使用要件を満たす事は難しく,複数のセンサが必要不可欠です.しかし,複数のセンサを用いて十分な情報を得たとしても,得られたセンサデータをどう結びつけて環境を理解するかが大きな問題となります.本研究では,デプスイメージの連結性に基づいてスーパーピクセルをつなぐ事でこの課題を解決します.
本研究の最終目標はRGBカメラデータとデプスマップを用いて日常生活での物品操作をする,ケージングマニピュレータのための賢いプランニングアルゴリズムの開発です.