
採用した戦略
【課題解釈・おおまかな戦略】
今回の課題の背景として原発の放射線廃棄物の回収がある。今回のフィールドはその状況を簡単にモデル化したものである。 そのため、実際に原発で運用できるような、自走できるようなものが良いであろうと考えた。 その結果、車輪で動き、デブリを持ち運ぶ戦略を採用した。 また、ある程度の量のデブリを一気に回収できることを目指した。
【具体的戦略】
今回の課題の背景として原発の放射線廃棄物の回収がある。今回のフィールドはその状況を簡単にモデル化したものである。 そのため、実際に原発で運用できるような、自走できるようなものが良いであろうと考えた。 その結果、車輪で動き、デブリを持ち運ぶ戦略を採用した。 また、ある程度の量のデブリを一気に回収できることを目指した。
【具体的戦略】
- 2台編成(EV3も2つ用意する):2台編成にしたのは、出た案の中でフィールドのフチを利用した一輪車型のロボットが単純に面白そうだったことと、 機能を分けることで各機械の動きを単純化し、機械の制作を簡単にする狙いがあった。
- EV3を分けたのは配線が長くなり、機体の動きに影響が出るのを嫌った結果である。
- 洗面器内の領域を中心付近の円と外周の2つに区分し、中心円に運搬ロボットが待機する。
- 1輪駆動の回収ロボットが洗面器の縁をガイドとして外周領域を円形に回ることでデブリをかき集め、それを運搬ロボット(四輪駆動)に入れる。運搬ロボットはそれを目的地まで運んでいく。
製作したロボットの概要
【回収ロボット(fig.1)】
fig.2の右部分のガイドによって洗面器のフチを挟むことでフチに沿って円形に移動できるようにした。 時計回り、反時計回りに繰り返し動くことで、くまなくデブリを回収し、なるべく多くショベルに押し込む。 前方についているツメ(fig.3)でデブリを押す。 また、運搬ロボットに載せるときもツメでデブリを運搬ロボットのショベル部分に押し込む。 振動するような動きにすることで、デブリを蹴るように押すことができ、ショベルに入りやすくなるようにした。
fig.2の右部分のガイドによって洗面器のフチを挟むことでフチに沿って円形に移動できるようにした。 時計回り、反時計回りに繰り返し動くことで、くまなくデブリを回収し、なるべく多くショベルに押し込む。 前方についているツメ(fig.3)でデブリを押す。 また、運搬ロボットに載せるときもツメでデブリを運搬ロボットのショベル部分に押し込む。 振動するような動きにすることで、デブリを蹴るように押すことができ、ショベルに入りやすくなるようにした。
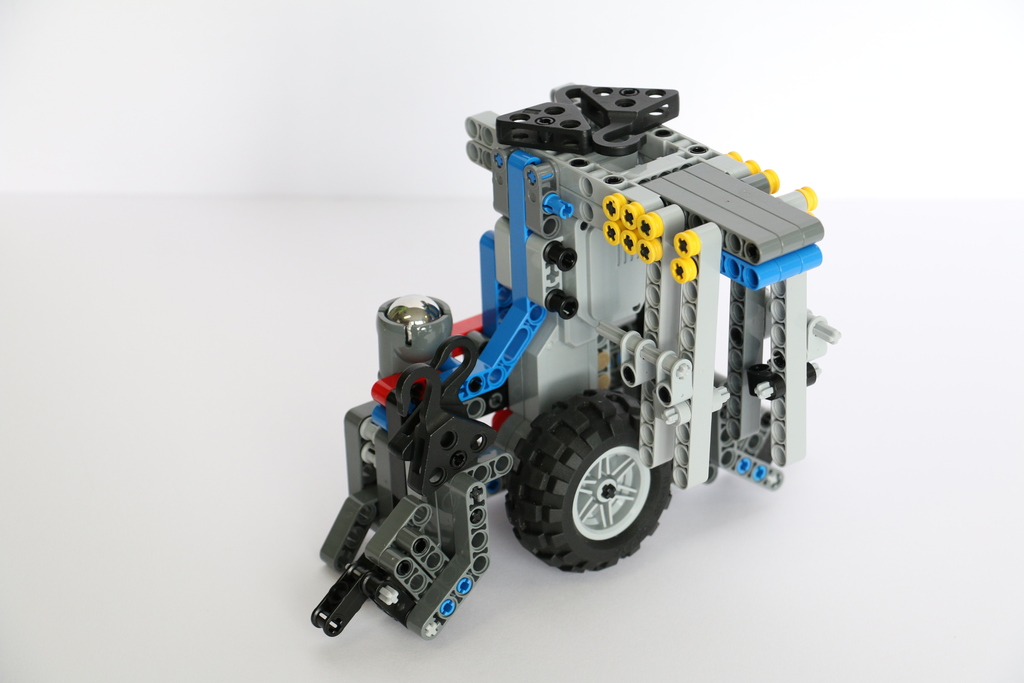
Fig. 1 回収ロボットの全体写真
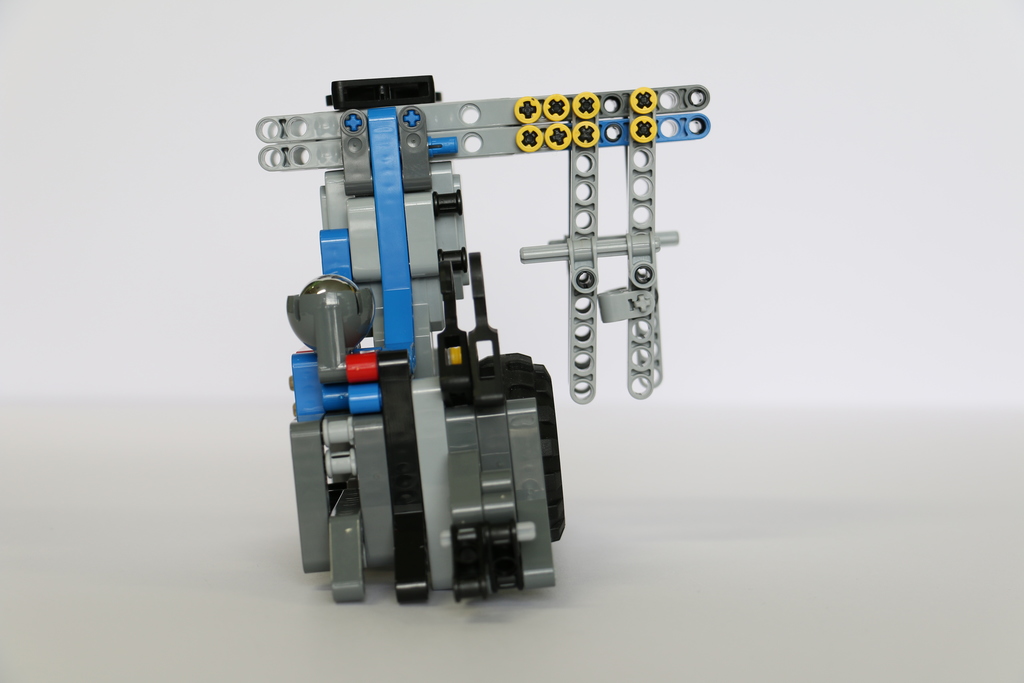
Fig. 2 回収ロボット全体(前方より見た写真)
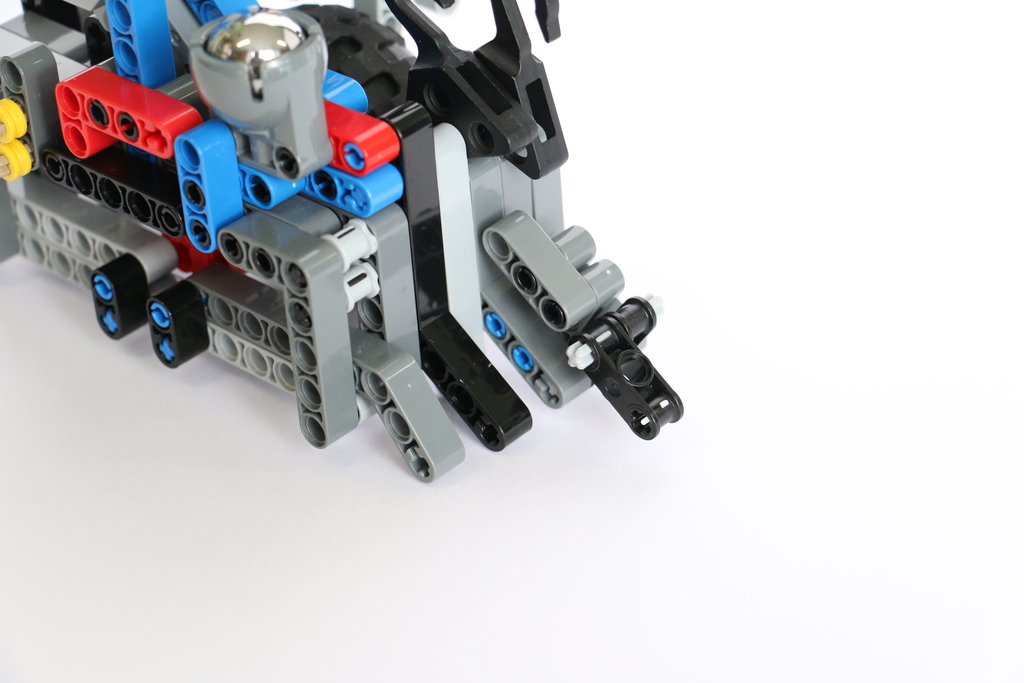
Fig. 3 ツメの部分の写真
【運搬ロボット(fig.4)】
外周領域のうち回収できない領域を減らすため、回収ロボットが両側からショベルにデブリを押し込むことができるように設計した。 4輪の車両タイプのマシンである。モーター一つを用いた、後輪駆動としている。 光センサを車体下面に取り付けた。橋の終わり付近にある黒いテープを検知して、適切な位置で停止し、デブリを解放する。 昇降可能なショベルをつけ、回収、運搬、解放までを行った。 駆動は糸とプーリーを用いてモーターで行っている。
外周領域のうち回収できない領域を減らすため、回収ロボットが両側からショベルにデブリを押し込むことができるように設計した。 4輪の車両タイプのマシンである。モーター一つを用いた、後輪駆動としている。 光センサを車体下面に取り付けた。橋の終わり付近にある黒いテープを検知して、適切な位置で停止し、デブリを解放する。 昇降可能なショベルをつけ、回収、運搬、解放までを行った。 駆動は糸とプーリーを用いてモーターで行っている。
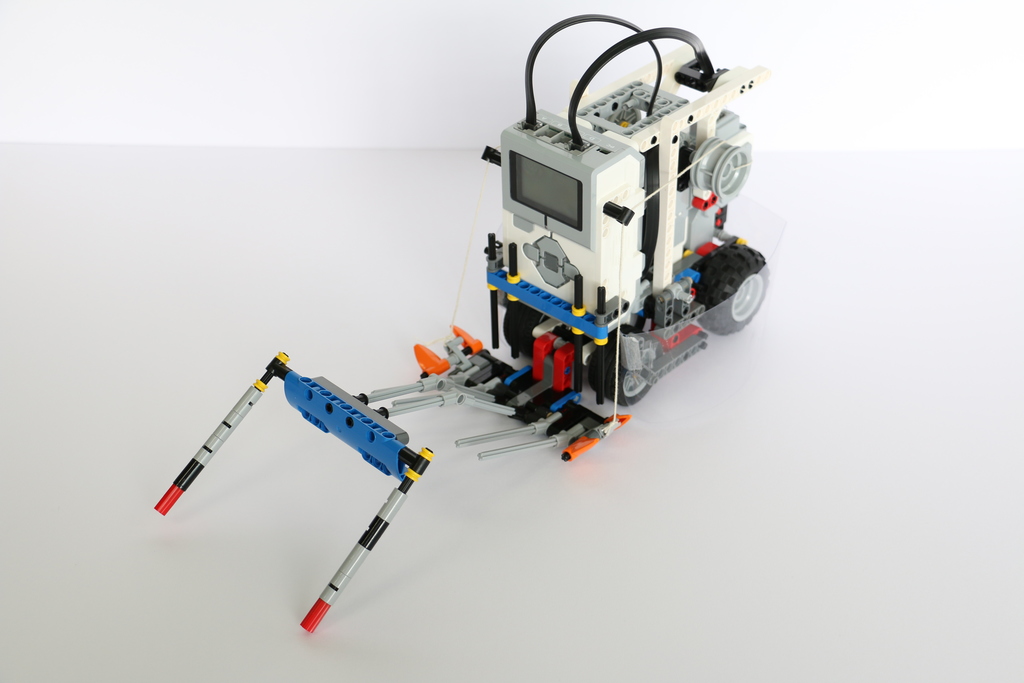
Fig. 4 運搬ロボットの全体写真
機構における工夫点
【回収ロボット】
移動について,1輪だと機体が安定せず傾いてしまい、その結果としてデブリをうまく押すことができないということがあったので、 ツメ下部を一部地面につけることで体勢を安定させた(fig.5)。 ガイドについて、洗面器のフチの傾きにより機体が傾いてしまわないようにガイドの部分を柔らかく作った。 デブリの運搬について,ツメ先端を前方に出すことで運搬ロボットのショベル部分に押し込めるようにした(fig.6, fig.7)。 また、動き方の都合上、外側のツメに継ぎ足しを入れた。 おもりについて,機体が軽すぎてデブリを押しづらいことがあったので鉄球を付けたり、適宜おもりをつけたりした。
移動について,1輪だと機体が安定せず傾いてしまい、その結果としてデブリをうまく押すことができないということがあったので、 ツメ下部を一部地面につけることで体勢を安定させた(fig.5)。 ガイドについて、洗面器のフチの傾きにより機体が傾いてしまわないようにガイドの部分を柔らかく作った。 デブリの運搬について,ツメ先端を前方に出すことで運搬ロボットのショベル部分に押し込めるようにした(fig.6, fig.7)。 また、動き方の都合上、外側のツメに継ぎ足しを入れた。 おもりについて,機体が軽すぎてデブリを押しづらいことがあったので鉄球を付けたり、適宜おもりをつけたりした。
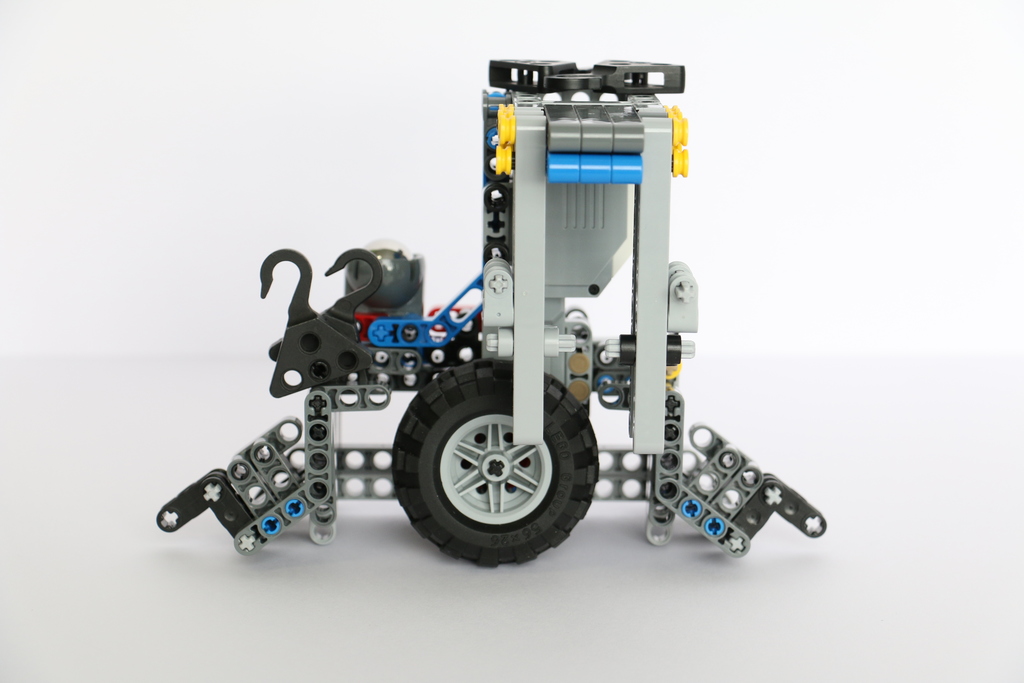
Fig. 5 回収ロボット側面

Fig. 6 回収ロボットのツメと運搬ロボットのショベルの連携
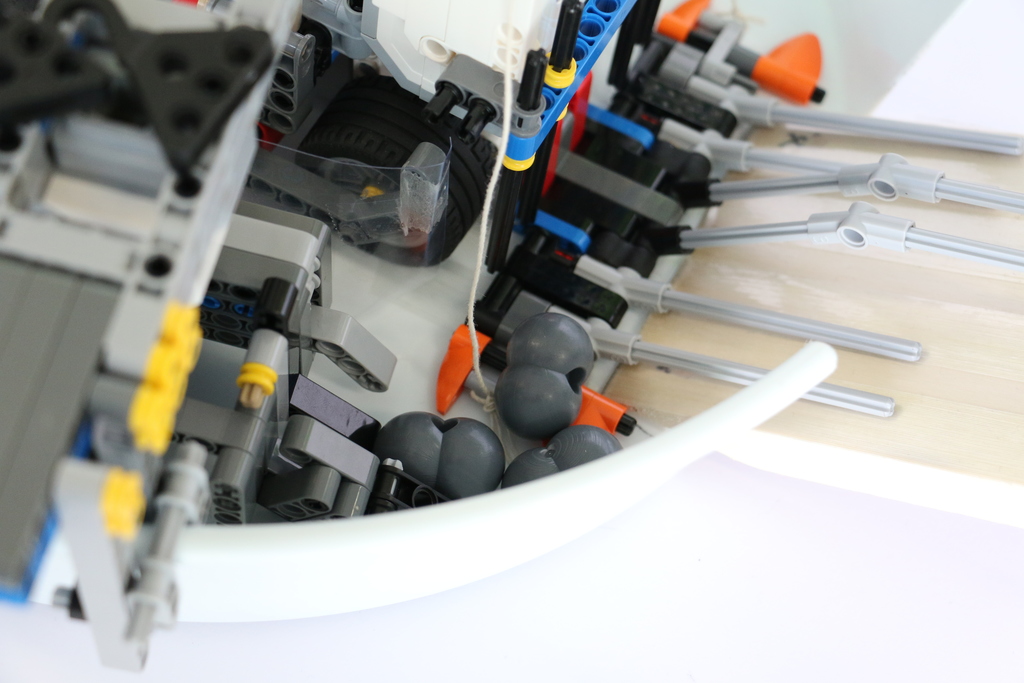
Fig. 7 デブリを押し込む様子
【運搬ロボット】
デブリ回収について(fig.8),ショベルは坂に沿うような形状をしている。 回収ロボットとの連携動作実験の結果、坂の方に押されていくデブリが多かった為である。 スペースの都合でショベルの水平部分がかなり小さくなっているが、回収率にはさほど影響がなかった。 デブリが運搬ロボットと回収ロボットの間に入るのを軽減するため、塩ビシートを運搬ロボットの外周に取り付けた。 回収ロボットがデブリ押したときに、デブリがうまくガイドされるように、広がり具合と、曲げ方(折り目をわざとつけた)を工夫している。 また、坂の上り始めの凹部分で地面に擦るのを防ぐため、車体後方のガイドは斜めにカットして短くしている(fig.9)。 デブリ保持について(fig.10),回収ロボットからデブリを受け取った後は、こぼさないように保持する必要がある。そのため、 ショベル両端が回転するようにし、運ぶ際に抑えられるようにした。 デブリがマシン本体側にこぼれるのを防ぐ縦棒は、ショベルではなくマシン本体側につけた。 機体の初期サイズ、登坂対応について, 洗面器から坂に移動するためには、洗面器の狭い切り欠き部分を通過しなければならない。 このため、幅を狭くつくる必要があり、走行用モータを1個にした。 急な坂を上っても転倒しないように、前後のタイヤ間距離をぎりぎりまで広げた。 重心の位置を調整するために、ev3をマシンのかなり前方につけている。 前輪は従動輪であるが、坂の上り始めの凹部分に引っかからないように、大きめのものを用いている。 モータやセンサを垂直に配置し、密度高く組むことでマシンをコンパクトに収めた(fig.11)。 サイズ制約が厳しく、ショベルにつけようとするとタイヤに当たる為である。 モータ1個でまっすぐ走行するために、橋の両サイドに引っかかるガイド(fig.12)をつくった。 ガイドは、一定以上の力で回転するようになっており、坂を越えて役割を終えると、 fig.13のようにゴール側の洗面器の縁で回転して、邪魔にならないように変形する。
デブリ回収について(fig.8),ショベルは坂に沿うような形状をしている。 回収ロボットとの連携動作実験の結果、坂の方に押されていくデブリが多かった為である。 スペースの都合でショベルの水平部分がかなり小さくなっているが、回収率にはさほど影響がなかった。 デブリが運搬ロボットと回収ロボットの間に入るのを軽減するため、塩ビシートを運搬ロボットの外周に取り付けた。 回収ロボットがデブリ押したときに、デブリがうまくガイドされるように、広がり具合と、曲げ方(折り目をわざとつけた)を工夫している。 また、坂の上り始めの凹部分で地面に擦るのを防ぐため、車体後方のガイドは斜めにカットして短くしている(fig.9)。 デブリ保持について(fig.10),回収ロボットからデブリを受け取った後は、こぼさないように保持する必要がある。そのため、 ショベル両端が回転するようにし、運ぶ際に抑えられるようにした。 デブリがマシン本体側にこぼれるのを防ぐ縦棒は、ショベルではなくマシン本体側につけた。 機体の初期サイズ、登坂対応について, 洗面器から坂に移動するためには、洗面器の狭い切り欠き部分を通過しなければならない。 このため、幅を狭くつくる必要があり、走行用モータを1個にした。 急な坂を上っても転倒しないように、前後のタイヤ間距離をぎりぎりまで広げた。 重心の位置を調整するために、ev3をマシンのかなり前方につけている。 前輪は従動輪であるが、坂の上り始めの凹部分に引っかからないように、大きめのものを用いている。 モータやセンサを垂直に配置し、密度高く組むことでマシンをコンパクトに収めた(fig.11)。 サイズ制約が厳しく、ショベルにつけようとするとタイヤに当たる為である。 モータ1個でまっすぐ走行するために、橋の両サイドに引っかかるガイド(fig.12)をつくった。 ガイドは、一定以上の力で回転するようになっており、坂を越えて役割を終えると、 fig.13のようにゴール側の洗面器の縁で回転して、邪魔にならないように変形する。
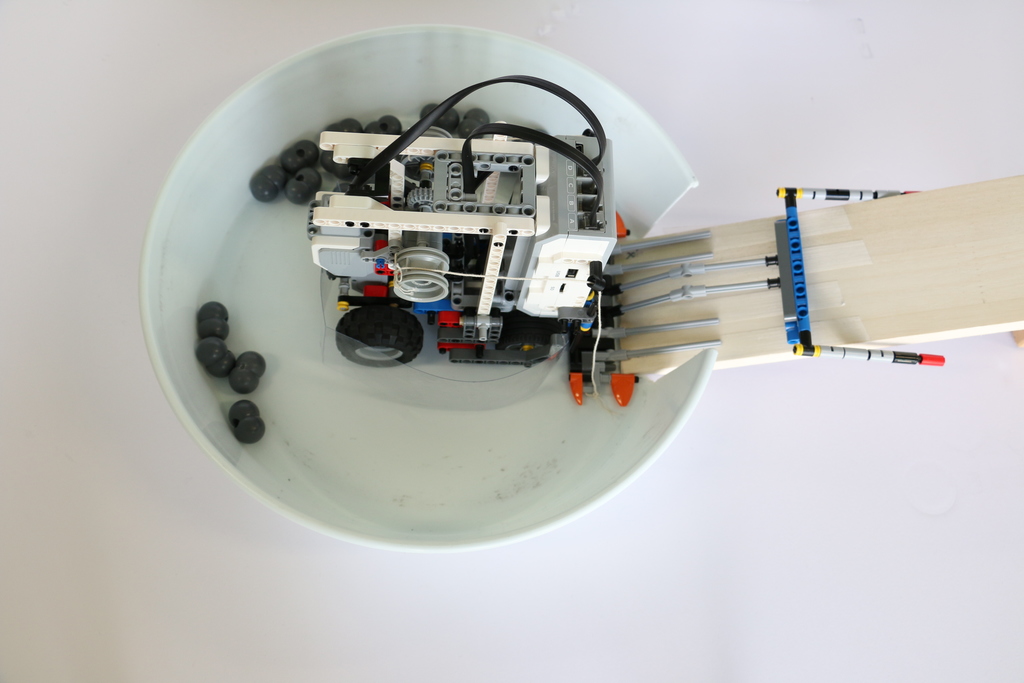
Fig. 8 運搬ロボットの初期姿勢
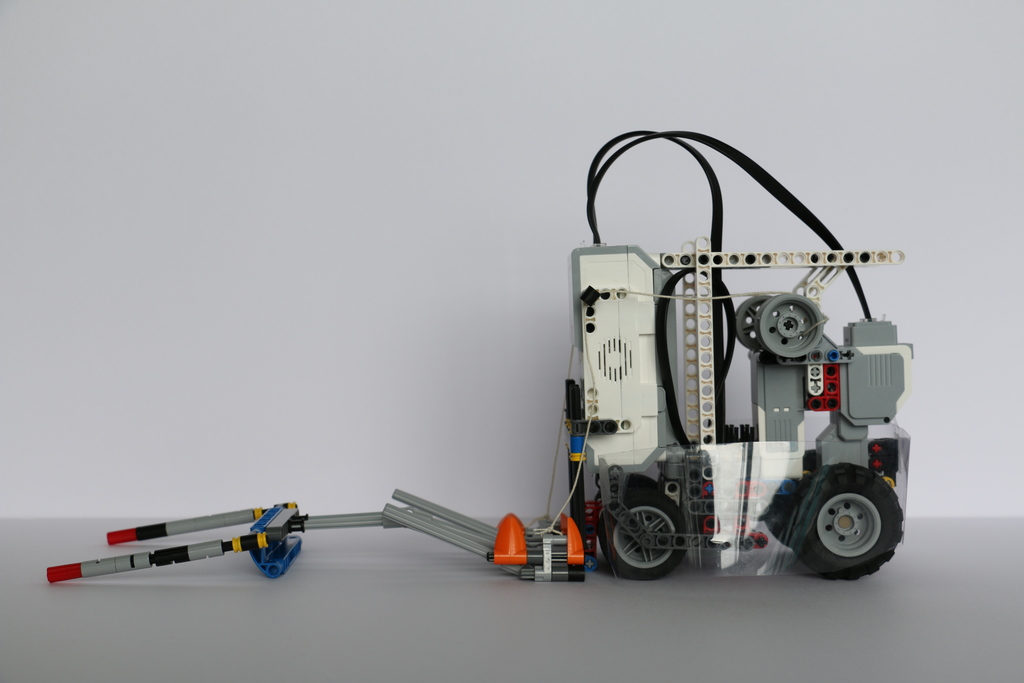
Fig. 9 運搬ロボットの側面
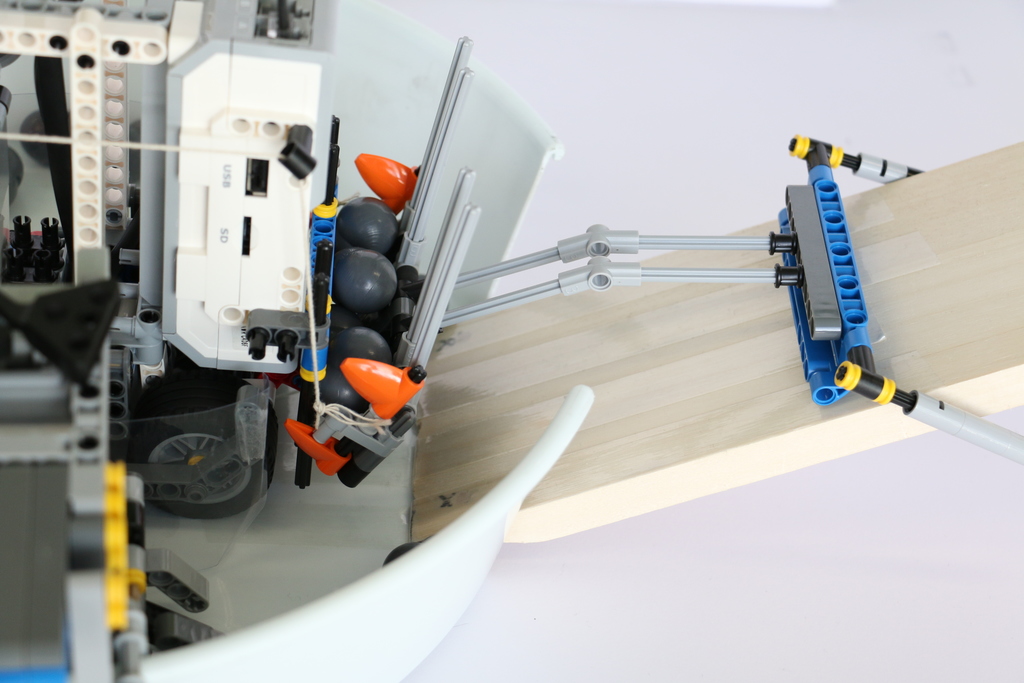
Fig. 10 回収ロボットがデブリを保持した様子
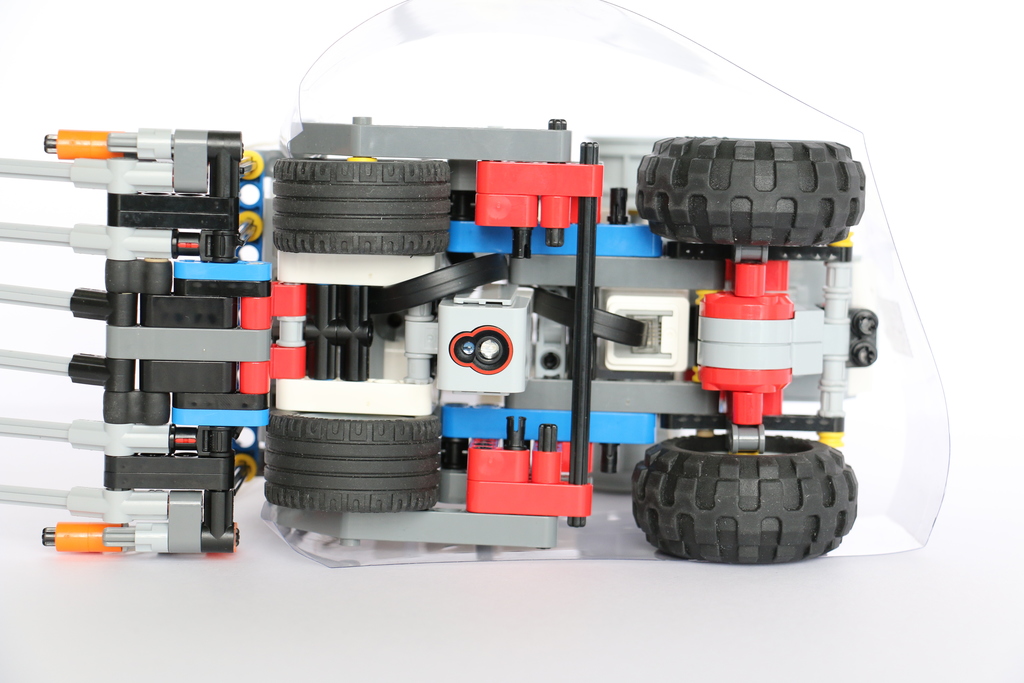
Fig. 11 運搬ロボットの下面
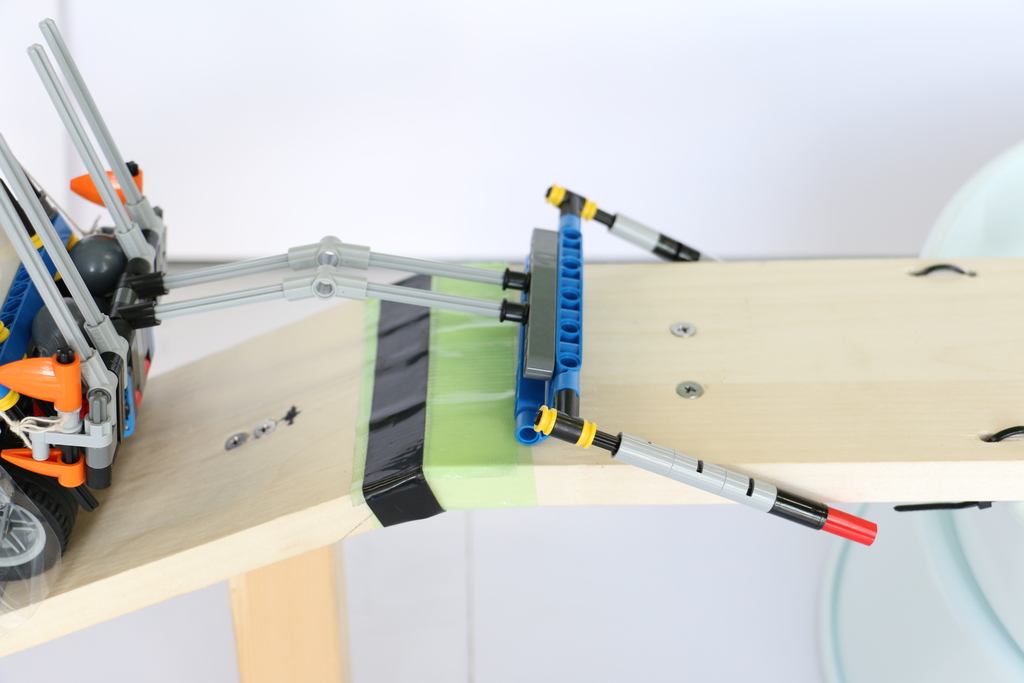
Fig. 12 ガイドを使って橋を走行する様子
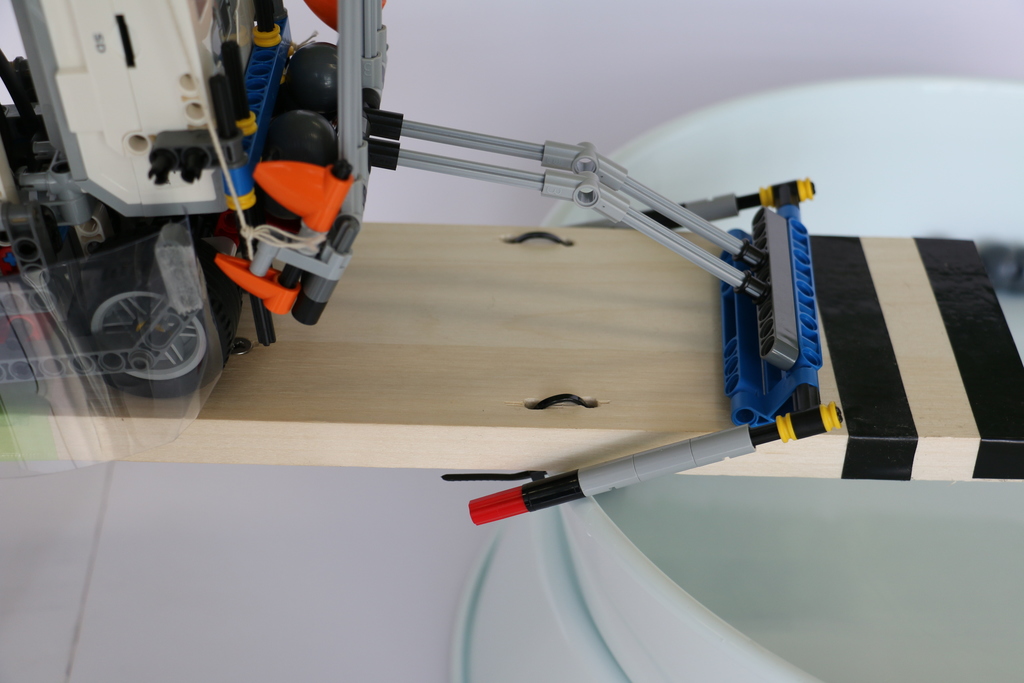
Fig. 13 ゴール側の洗面器によってガイドが回転する様子
製作結果とその分析
【回収ロボット】
概ね求められていた機能は達成したが、いくつか問題が残った。 まず、デブリの回収が完全でなく、回収ロボットと運搬ロボットの境界にデブリが残ってしまった。 原因としてツメの形の調整不足が挙げられる。 また、ガイドがフチに引っかかって機体が進まなくなることが偶におこってしまった。 ガイドの方法に難があり、側面にローラーをつけるべきであった。
【運搬ロボット】
初期状態で地面に接する、タイヤに干渉しない、橋の最後で下すと水平より下まで下がる(ことによってデブリを落とせる)、という要求仕様をすべて満たすショベルを設計することが難しかった。 橋がかなり狭いので、ある程度幅が必要なライントレースはせず、ガイドによって直進する方針を取った。 停止位置検知の為に光センサを載せたが、製作作業の最後に急遽搭載したため、地面ぎりぎりになってしまい、坂の終わりの凸部分に擦ってしまうことがときどき起きた。 上でも述べているが、運搬ロボットは主に坂に苦しんだ。急なわりに幅が狭く、下の洗面器の切り欠きが坂と同程度の幅しかない点に苦労した。 車両型のコンセプトで設計した結果、占有可能面積の狭さから背の高いマシンになってしまい、走行安定性を上げられなかった。 例えば、初期姿勢が坂まで広がっているような形状のマシンにすると設計がもう少し容易であったのではないかと考えている。
【全体】
多く回収することを優先したため、デブリ回収率や、回収したデブリの排出率が上げきれなかった。 2機の連携が時間によりタイミングを合わせるだけになってしまった。実用の場面を考えると、センサーを用いた連携をするべきであったが、洗面器の中は狭く、機能を妨げることなくセンサーを配置することができなかった。 今回の設計方針は一つの解だと思う。 しかし、2台にしたのがよかったかは疑問が残る。 2台とも下の洗面器を初期位置としたため、サイズの制約が厳しくなり、おたがいが邪魔になってた。 また、2台構成を採用するとしても、領域や役割の分担をもう少し工夫して、坂を上るマシンをヘビ型にする等すれば、個々のマシンの性能を上げやすかったように思う。
概ね求められていた機能は達成したが、いくつか問題が残った。 まず、デブリの回収が完全でなく、回収ロボットと運搬ロボットの境界にデブリが残ってしまった。 原因としてツメの形の調整不足が挙げられる。 また、ガイドがフチに引っかかって機体が進まなくなることが偶におこってしまった。 ガイドの方法に難があり、側面にローラーをつけるべきであった。
【運搬ロボット】
初期状態で地面に接する、タイヤに干渉しない、橋の最後で下すと水平より下まで下がる(ことによってデブリを落とせる)、という要求仕様をすべて満たすショベルを設計することが難しかった。 橋がかなり狭いので、ある程度幅が必要なライントレースはせず、ガイドによって直進する方針を取った。 停止位置検知の為に光センサを載せたが、製作作業の最後に急遽搭載したため、地面ぎりぎりになってしまい、坂の終わりの凸部分に擦ってしまうことがときどき起きた。 上でも述べているが、運搬ロボットは主に坂に苦しんだ。急なわりに幅が狭く、下の洗面器の切り欠きが坂と同程度の幅しかない点に苦労した。 車両型のコンセプトで設計した結果、占有可能面積の狭さから背の高いマシンになってしまい、走行安定性を上げられなかった。 例えば、初期姿勢が坂まで広がっているような形状のマシンにすると設計がもう少し容易であったのではないかと考えている。
【全体】
多く回収することを優先したため、デブリ回収率や、回収したデブリの排出率が上げきれなかった。 2機の連携が時間によりタイミングを合わせるだけになってしまった。実用の場面を考えると、センサーを用いた連携をするべきであったが、洗面器の中は狭く、機能を妨げることなくセンサーを配置することができなかった。 今回の設計方針は一つの解だと思う。 しかし、2台にしたのがよかったかは疑問が残る。 2台とも下の洗面器を初期位置としたため、サイズの制約が厳しくなり、おたがいが邪魔になってた。 また、2台構成を採用するとしても、領域や役割の分担をもう少し工夫して、坂を上るマシンをヘビ型にする等すれば、個々のマシンの性能を上げやすかったように思う。
感想
- 私はモノを作ったりする経験が少なかったので、相方、TA、先生の案や考え方は学ぶことが多く、勉強になった。 また、作戦を練り、試行錯誤を繰り返して一つのモノを作るのは良い経験になった。(橋本)
- 試行錯誤しながらも、先生、先輩方の助言に助けられつつ、相方と協力して動くものを作ることができ、良かった。 (基本的に)レゴのパーツで製作する、という制約の中で課題解決に向けて設計・製作する点が、今までにない経験で特に面白かった。(青田)