
Fig. 1
採用した戦略
瓦礫を効率良く確実に円筒容器から取り出せる戦略が美しいと考え、2通りの方針について議論した。
一つは円筒容器を持ち上げ、下から瓦礫を取り出す方法、もう一つは円筒容器は動かさず、
ロボットが円筒容器に入り瓦礫を回収する方法である。モータの出力などの制約条件から、
後者を採用した。作業を効率化するため、以下の2種類のロボットを作製し、機能ごとに役割分担させた。
- Henry : 円筒容器の底で瓦礫を回収する。
- Henrietta : 円筒容器上部において、Henryと、Henryから受け取った瓦礫の入った容器を紐で上下する。
製作したロボットの概要
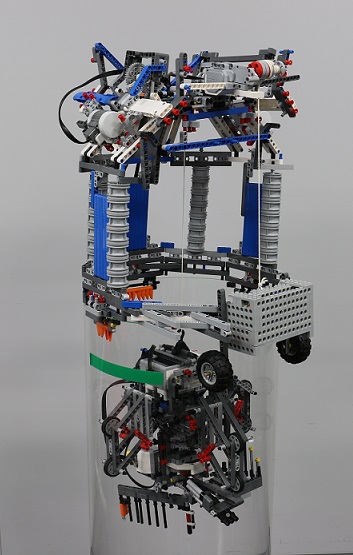
- Henry (Fig. 2)
Henryには2つのモータが装備されており、それぞれHenryの下部の櫛状の構造部とくわ状の構造部を回転させる(Fig3)。 これらを駆使し、後述の1~7の流れで瓦礫を回収する戦略を実現した。 - Henrietta(Fig. 4)
円筒容器の上部に覆いかぶさるように設置され、容器の縁を把持することで自らと紐を介して連結されたHenryを安定して支える。 側面のモータで円筒容器中に吊られたHenryを昇降させ、安全な降下と瓦礫改修後Henryが円筒上部まで無事に帰還させる 。帰還したHenryから瓦礫を受け取り、上部モータで円筒外部に降ろす機構も備えている。また、Bluetooth通信によりHenryとのスムーズな連係動作が可能である。
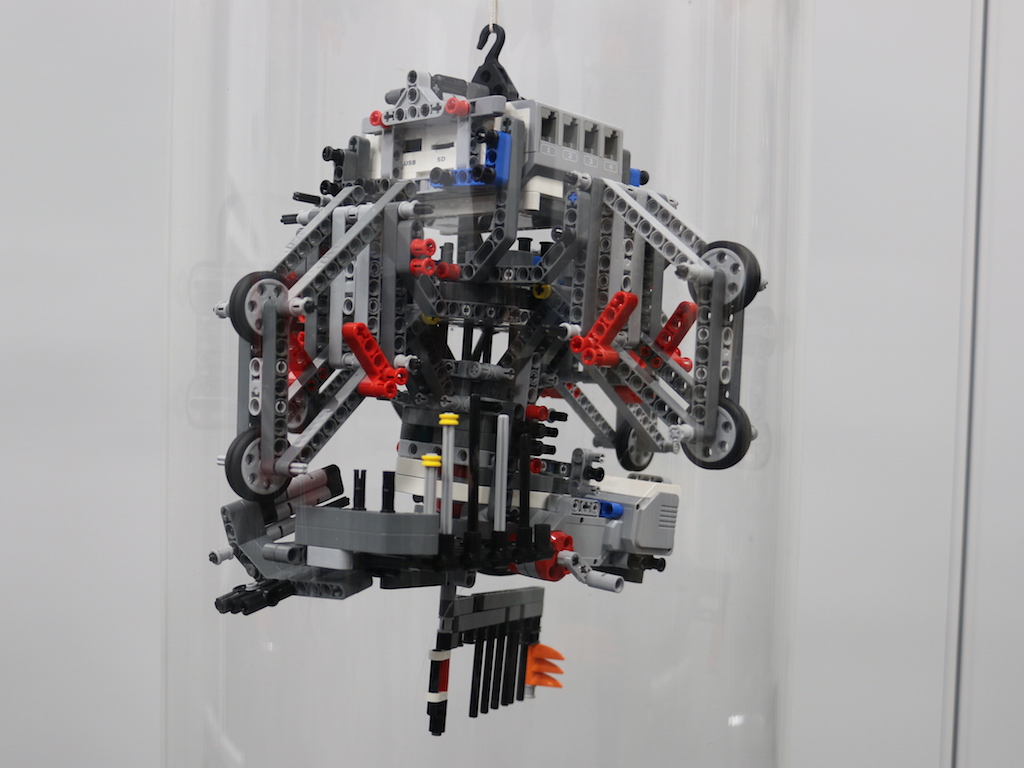
Fig. 2
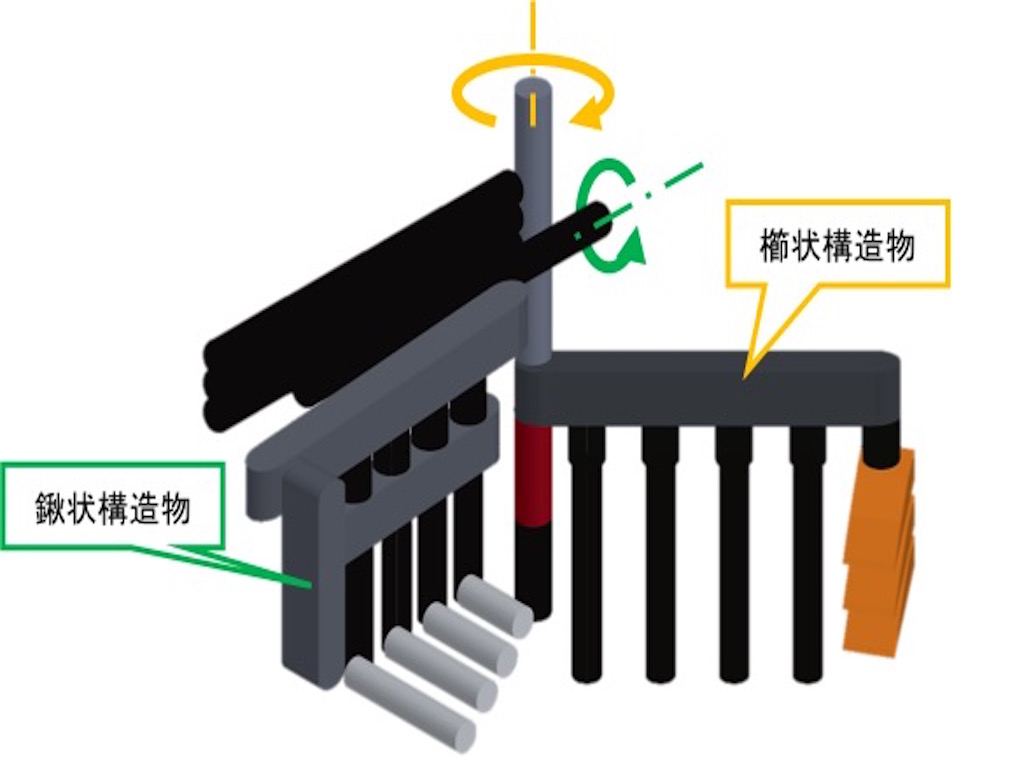
Fig. 3
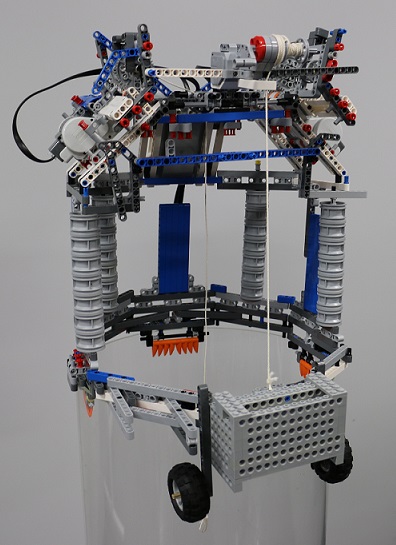
Fig. 4
HenryとHenriettaの連携動作の流れを以下に記す。
- 予めHenryとHenriettaをBluetooth接続しておく。
- Henryが円筒容器上部にある状態から開始し、Henriettaが吊り下ろしていく。
- Henryの下端が地面についたタイミングでHenriettaに装備されたスイッチを押すと、Henryに回収作業開始を合図する信号が送られる。
- Fig. 5~9に示すように2つの構造部を交互に回転させ、瓦礫をくわ状構造部の上に集める。
- Henriettaに信号を送り、Henryを吊り上げる。
- くわ状構造部が円筒上端に達したタイミングでHenriettaのスイッチを押すと、Henryに信号が送られ、くわ状構造部を上下に揺らすことで瓦礫が円筒外部の容器に入る。
- 容器で受け取った瓦礫を、Henriettaが円筒外部へゆっくりと降ろす。
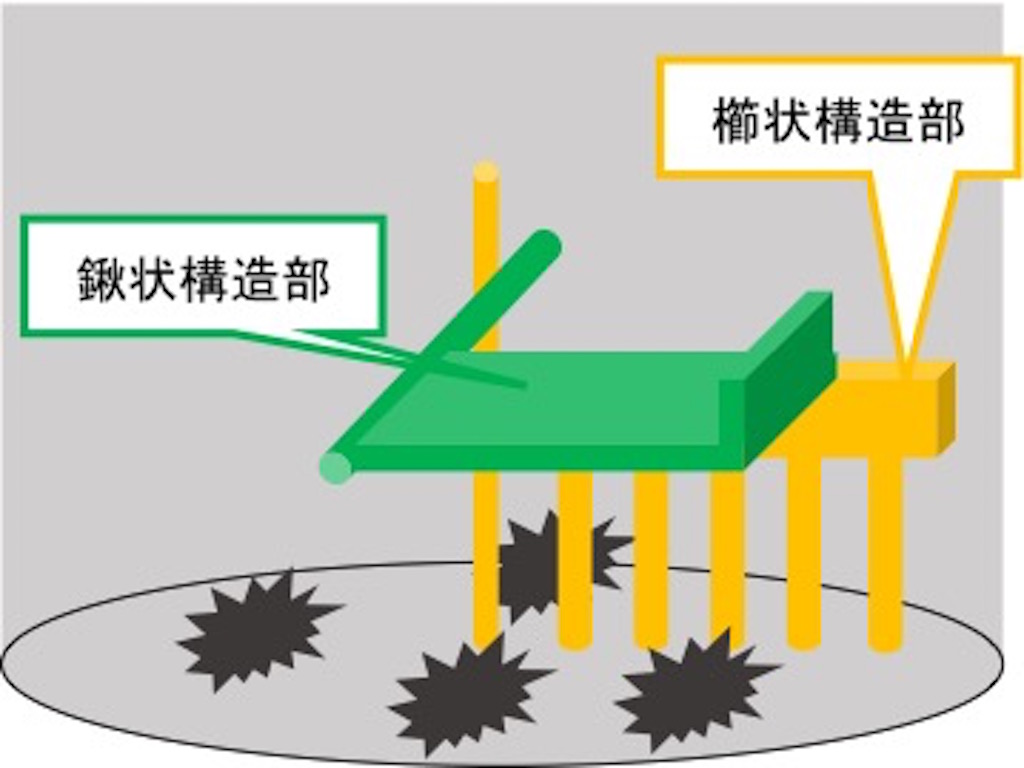
Fig. 5
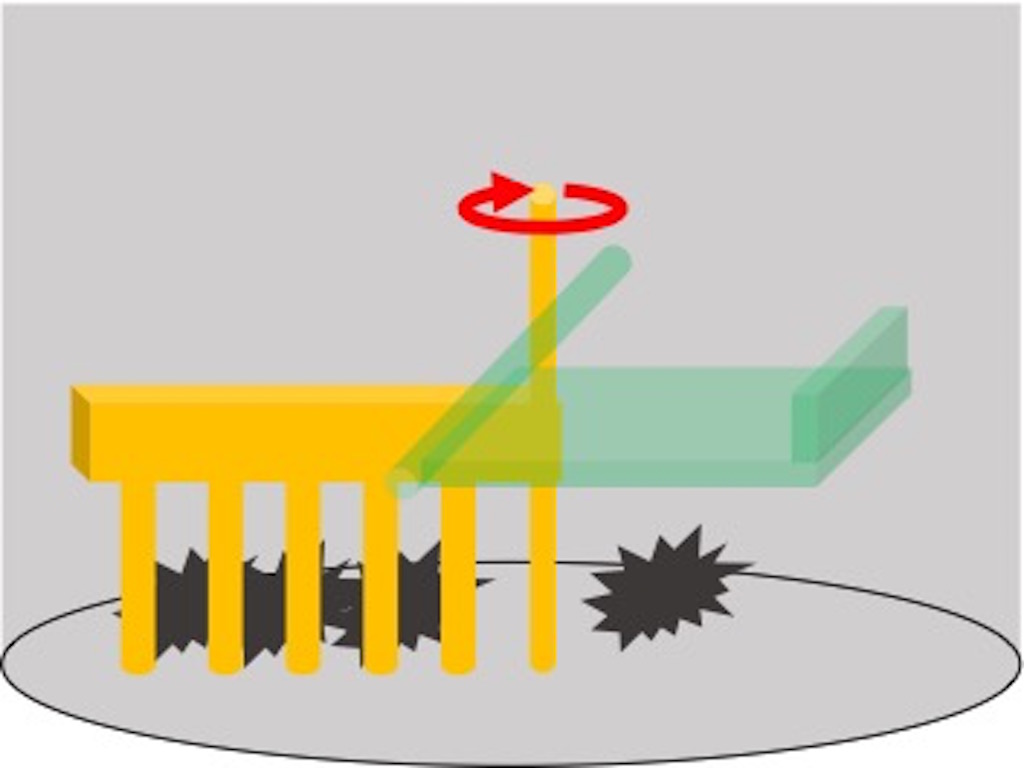
Fig. 6
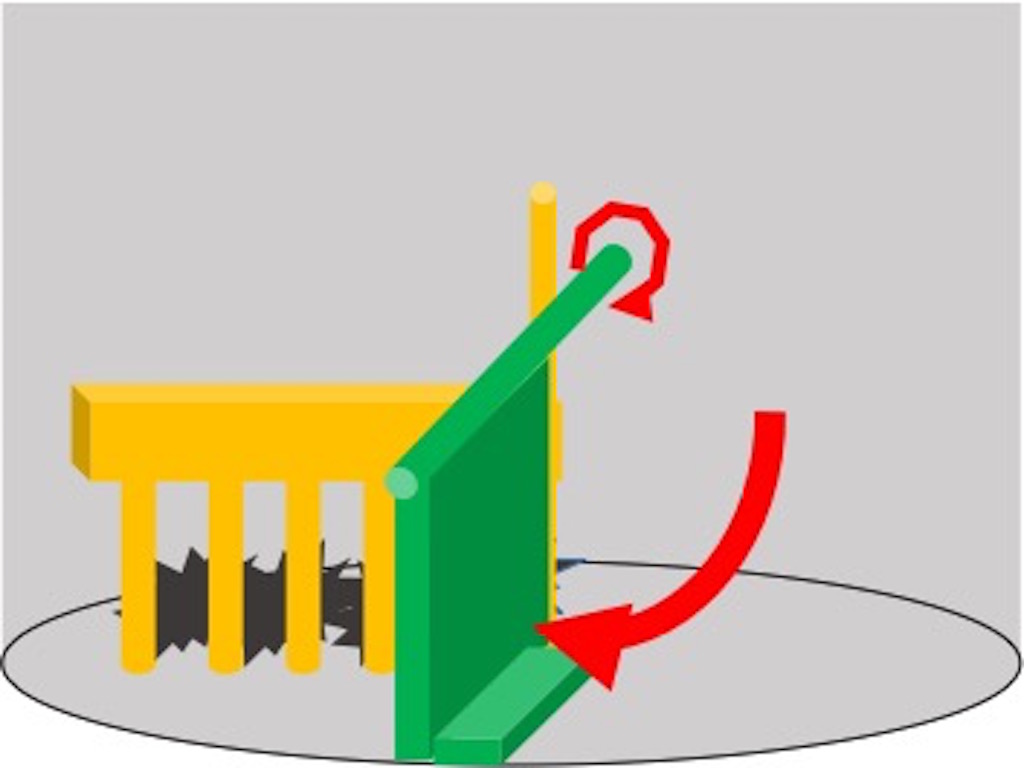
Fig. 7
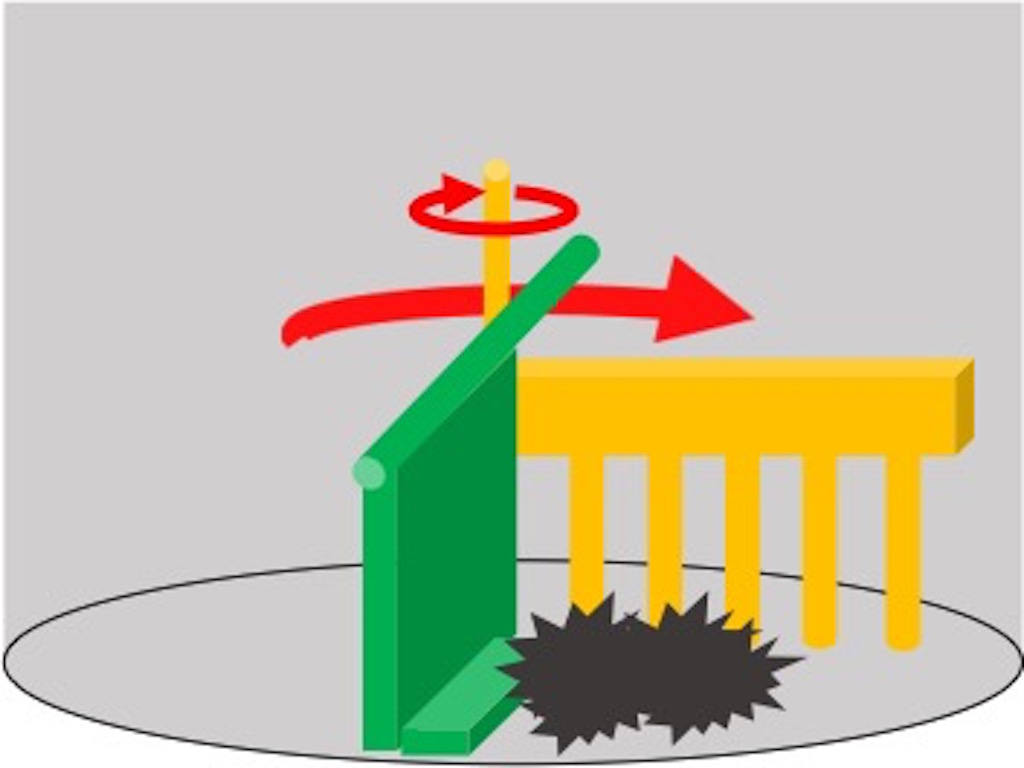
Fig. 8
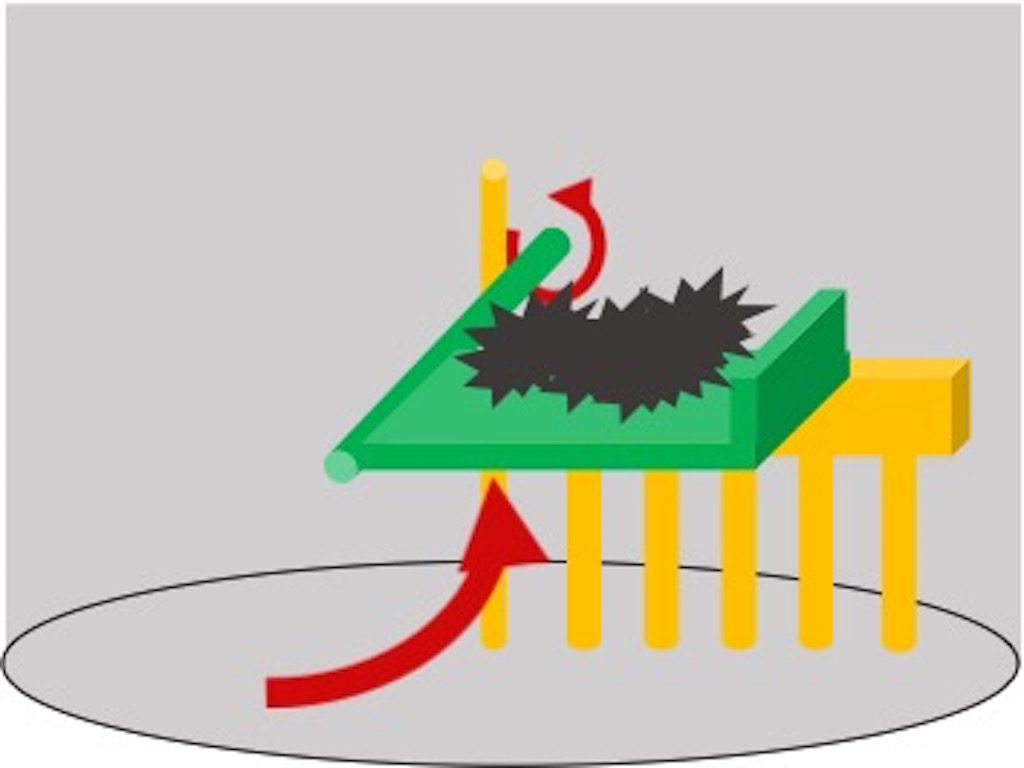
Fig. 9
機構における工夫点
・Henry
くわ状構造部の回転軸を円筒の中心軸と一致させ、水平に回転させなければならないため、 Henryの位置を正確に定める必要がある。そこで、8つのタイヤで円筒の内壁と接触することで常に水平を保てるようにした。 また、くわ状構造部で瓦礫かき集める際、瓦礫の反力でHenry自身が回転してしまうのを防ぐため、 Henryの下部構造の重さによって車輪が外に広がるような機構(Fig. 10)を採用した。さらに、アクチュエータの数を抑えるため、 Henryが円筒上部に来たら瓦礫が勝手に容器に滑り込むよう、くわ状構造部の上部に傾斜をつけた(Fig. 11)。
・Henrietta
Henryの重量を支え安全に昇降させるため、側面モータの動力はギアを介して減速された上で紐の巻かれたドラムに伝えられる(Fig. 12)。 HenryとHenriettaを接続する紐はHenryの中心近くを支え、Henryの姿勢を安定しやすくする。自重とHenryの重さを両方とも支えるために、 機体フレームはお寺の鐘楼堂のように内側に引っ張る荷重に対しての剛性を高くした。 特にHenryの接続されたモータ周りはパーツのたわみやはずれを無くすためブレース(Fig. 13)をつけるなど、構造物としての強度を追求した。 Henryが円筒の上まで上がりやすいように、ブレースにはガイド(Fig. 14)がついている。 また、Henryを円筒の上まで引き上げきるスペースを確保するために、太い柱で高さ方向にオフセットをとっている。 Henryを引き上げた後、瓦礫を円筒外部にでた容器で受け取った後、紐を送り出して容器を吊り下げ、瓦礫を安全に一箇所にまとめて下に降ろせるようにした。
くわ状構造部の回転軸を円筒の中心軸と一致させ、水平に回転させなければならないため、 Henryの位置を正確に定める必要がある。そこで、8つのタイヤで円筒の内壁と接触することで常に水平を保てるようにした。 また、くわ状構造部で瓦礫かき集める際、瓦礫の反力でHenry自身が回転してしまうのを防ぐため、 Henryの下部構造の重さによって車輪が外に広がるような機構(Fig. 10)を採用した。さらに、アクチュエータの数を抑えるため、 Henryが円筒上部に来たら瓦礫が勝手に容器に滑り込むよう、くわ状構造部の上部に傾斜をつけた(Fig. 11)。
・Henrietta
Henryの重量を支え安全に昇降させるため、側面モータの動力はギアを介して減速された上で紐の巻かれたドラムに伝えられる(Fig. 12)。 HenryとHenriettaを接続する紐はHenryの中心近くを支え、Henryの姿勢を安定しやすくする。自重とHenryの重さを両方とも支えるために、 機体フレームはお寺の鐘楼堂のように内側に引っ張る荷重に対しての剛性を高くした。 特にHenryの接続されたモータ周りはパーツのたわみやはずれを無くすためブレース(Fig. 13)をつけるなど、構造物としての強度を追求した。 Henryが円筒の上まで上がりやすいように、ブレースにはガイド(Fig. 14)がついている。 また、Henryを円筒の上まで引き上げきるスペースを確保するために、太い柱で高さ方向にオフセットをとっている。 Henryを引き上げた後、瓦礫を円筒外部にでた容器で受け取った後、紐を送り出して容器を吊り下げ、瓦礫を安全に一箇所にまとめて下に降ろせるようにした。
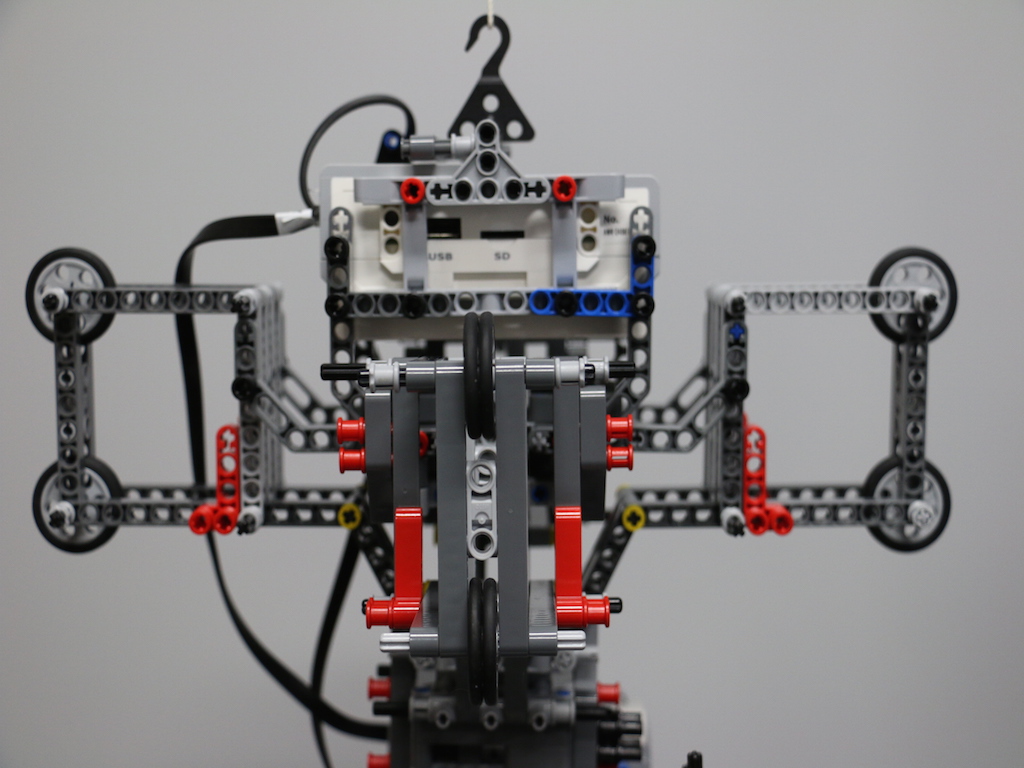
Fig. 10
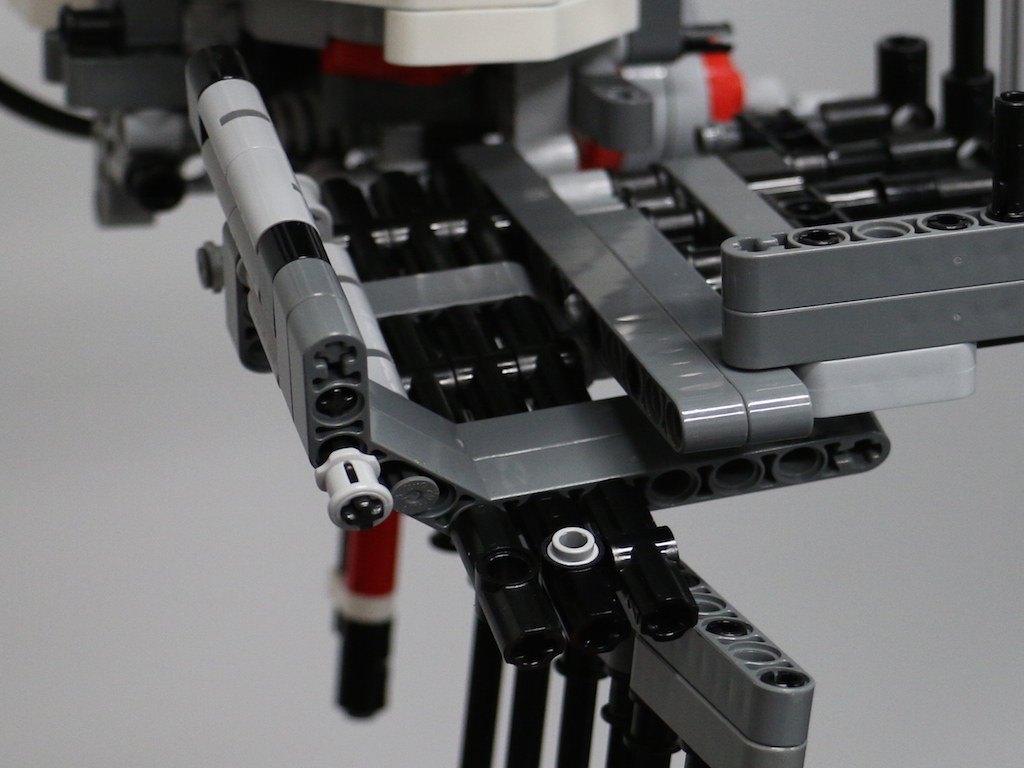
Fig. 11
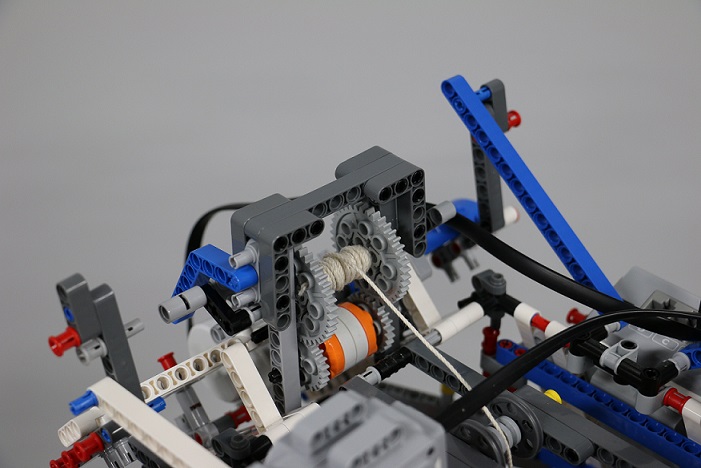
Fig. 12
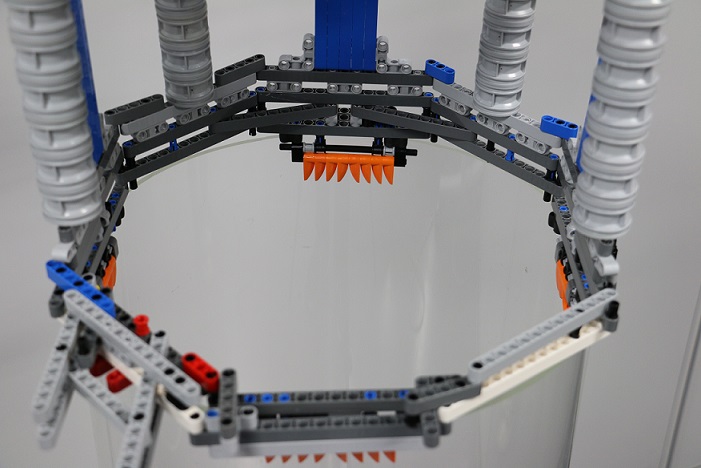
Fig. 13
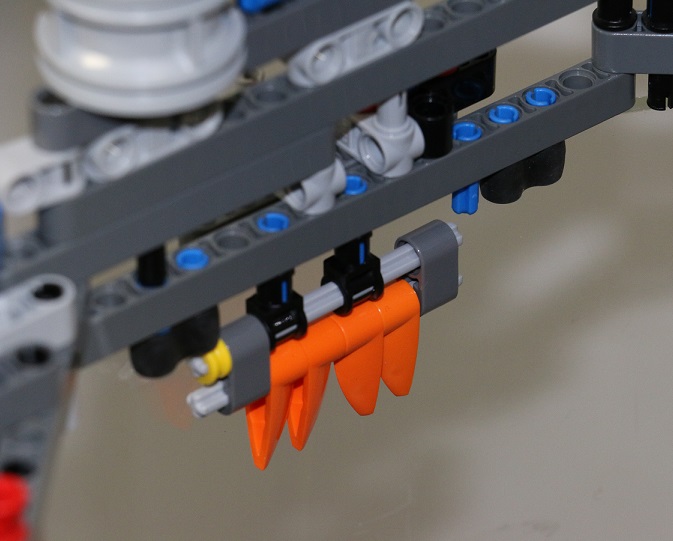
Fig. 14
製作結果とその分析
・ Henry
円筒内を水平を保ったまま移動でき、瓦礫を集める際に回転してしまうこともなかったので位置決めの精度は十分であった。 しかし、モータの回転角が決め打ちなので、かき上げられる瓦礫の個数が少なく、 かつ最初に置かれている瓦礫の個数に依存する設計となってしまった。瓦礫の個数に依らず安定した回収率を実現するためには、 Henry下部の瓦礫回収機構を改良する必要がある。
・Henrietta
吊り下げられたHenryと自重を支える程度の剛性は確保できたが、横から押された時などは用意にたわんでグラグラしてしまう。 また、減速しているとはいえHenryをモータ一つで支えているため、ギアにかかる負荷が大きく、 構造的に歯飛びを防いでてもギアの削れが起きてしまった。設計方針の変更についていけていない部分があるので、 不要な部分を排除して空いたスペースで構造を強化するなどの改良が望まれる。
円筒内を水平を保ったまま移動でき、瓦礫を集める際に回転してしまうこともなかったので位置決めの精度は十分であった。 しかし、モータの回転角が決め打ちなので、かき上げられる瓦礫の個数が少なく、 かつ最初に置かれている瓦礫の個数に依存する設計となってしまった。瓦礫の個数に依らず安定した回収率を実現するためには、 Henry下部の瓦礫回収機構を改良する必要がある。
・Henrietta
吊り下げられたHenryと自重を支える程度の剛性は確保できたが、横から押された時などは用意にたわんでグラグラしてしまう。 また、減速しているとはいえHenryをモータ一つで支えているため、ギアにかかる負荷が大きく、 構造的に歯飛びを防いでてもギアの削れが起きてしまった。設計方針の変更についていけていない部分があるので、 不要な部分を排除して空いたスペースで構造を強化するなどの改良が望まれる。
感想
- LEGOは容易に組み立て、分解ができるので、実際に試作してみる中で新たな発見があった。 上手くいかないこともあったが、試行錯誤しながら作品を改良していく過程が楽しかった。 TAのアドバイスや他の学生の作品から学ぶことが多く、いい経験となった。(沖芝)
- LEGO MINDSTORMのパーツを用いることで、使用できる寸法に制約が出る反面、 作って組み替えての試行錯誤を重ねやすかった。この利点を生かしきれたとは言えないが、 たとえ製作方針を誤ってもすぐに軌道修正が可能な事が有り難かった。LEGOで組むことのできる形状は以外に多彩で、先生やTA、他の学生の作るものに多くを学んだ。(鈴木)