
採用した戦略
戦略の美しさとして、できるだけ少ない手数で配管から瓦礫の撤去を実現することを目標とした。
そこで、我々は一台のロボットのみで瓦礫の回収、運搬、配管からの排出までを行うことにした。
一台のロボットであれば、複数のロボットで作業する場合に生じる「瓦礫の受け渡し」という手順を省くことができる。
また現実の廃炉での作業を考えた場合、複数のロボットが瓦礫の落ちている配管内という劣悪な環境で、
動作不良を起こすことなく協調しながら長時間駆動することの難しさを考えると、
一台の確実に動作するロボットを制作ほうが比較的容易であると考え、この戦略を採用した。
製作したロボットの概要
今回制作したロボット(Fig. 1)の機構は主に以下の三つの機構から構成される。
1. 下降・上昇機構
ロボットは、四つの側面に取り付けられたタイヤを配管の内側に押し付け、そのタイヤを駆動することで下降と上昇を行う。 タイヤの向きは水平より僅かに傾けた方向で取り付けられており(Fig. 2)、ロボット全体が回転しながら下降と上昇を行うようになっている。
2. 瓦礫回収機構
瓦礫回収機構はロボットの底面に取り付けられた計四つのクローラー(Fig. 3, Fig. 4)と ロボットの中心を縦に貫くように配置されたベルトコンベアで構成される。 ロボットは配管の底に到達すると、その場でマシン全体が数十秒間回転する。 そのあいだ、ロボット底部で回転するクローラーがロボットの底面中心まで瓦礫を集め続ける。 中心部にはベルトコンベアの入口があり、クローラーによって運び込まれた瓦礫はベルトコンベアによって ロボット上部にある収納スペースまで運び込まれる仕組みになっている。
3. 瓦礫排出機構
瓦礫排出機構は、ロボットの上部側面に取り付けられた超音波センサ(Fig. 5)と 開閉可能な瓦礫収納スペース(Fig. 6)からなる。また、配管の上部には板と瓦礫回収箱が取り付けられている(Fig. 7)。 ロボットが配管頂上に達すると、超音波センサが板を検出することでロボットが配管の頂上に到達したことと、 ロボットが向いている方向を確認する。そののち、ロボットの収納スペースの扉を開けることで瓦礫回収箱へと瓦礫を排出する(Fig. 8)。
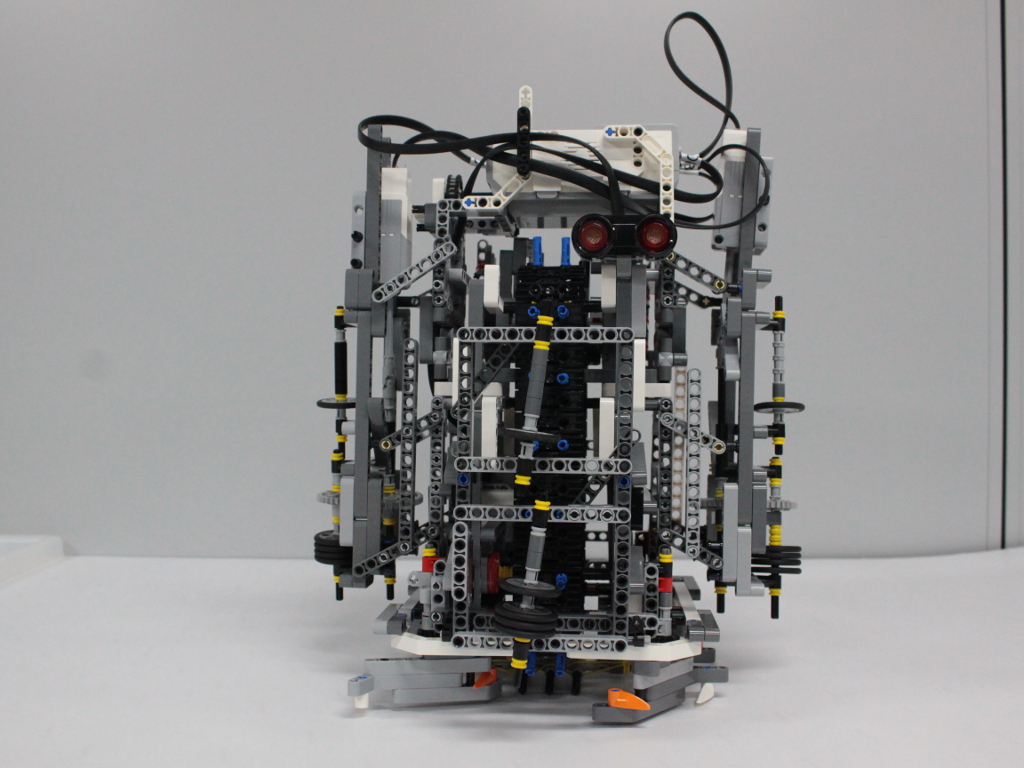
Fig. 1
1. 下降・上昇機構
ロボットは、四つの側面に取り付けられたタイヤを配管の内側に押し付け、そのタイヤを駆動することで下降と上昇を行う。 タイヤの向きは水平より僅かに傾けた方向で取り付けられており(Fig. 2)、ロボット全体が回転しながら下降と上昇を行うようになっている。
2. 瓦礫回収機構
瓦礫回収機構はロボットの底面に取り付けられた計四つのクローラー(Fig. 3, Fig. 4)と ロボットの中心を縦に貫くように配置されたベルトコンベアで構成される。 ロボットは配管の底に到達すると、その場でマシン全体が数十秒間回転する。 そのあいだ、ロボット底部で回転するクローラーがロボットの底面中心まで瓦礫を集め続ける。 中心部にはベルトコンベアの入口があり、クローラーによって運び込まれた瓦礫はベルトコンベアによって ロボット上部にある収納スペースまで運び込まれる仕組みになっている。
3. 瓦礫排出機構
瓦礫排出機構は、ロボットの上部側面に取り付けられた超音波センサ(Fig. 5)と 開閉可能な瓦礫収納スペース(Fig. 6)からなる。また、配管の上部には板と瓦礫回収箱が取り付けられている(Fig. 7)。 ロボットが配管頂上に達すると、超音波センサが板を検出することでロボットが配管の頂上に到達したことと、 ロボットが向いている方向を確認する。そののち、ロボットの収納スペースの扉を開けることで瓦礫回収箱へと瓦礫を排出する(Fig. 8)。
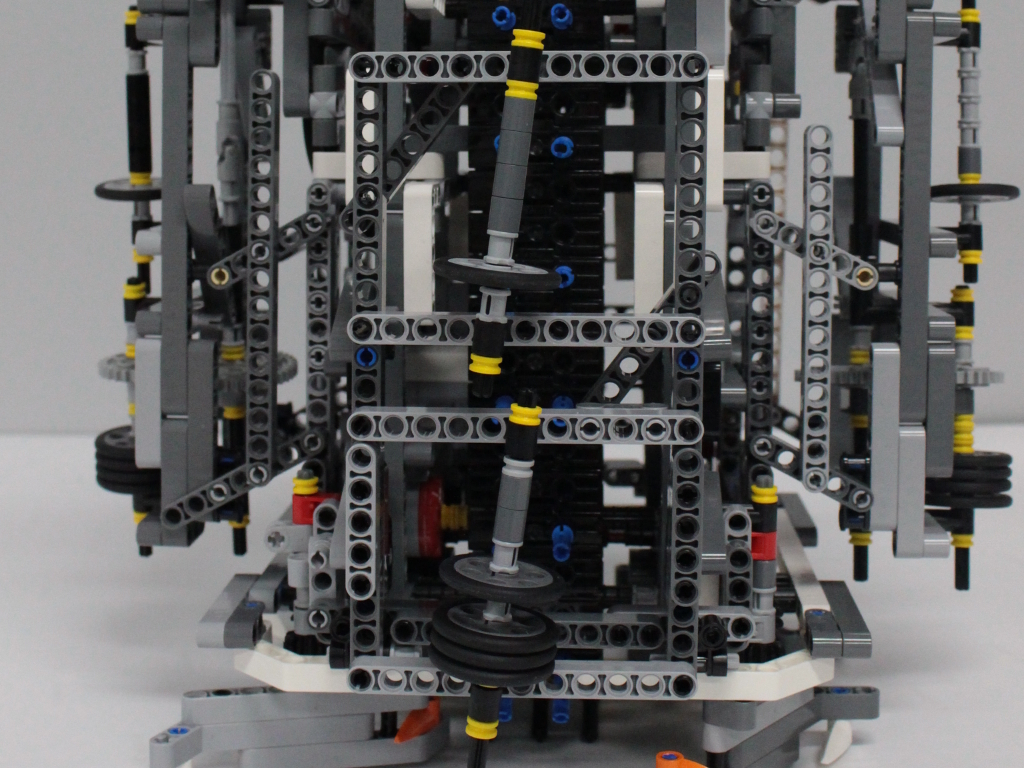
Fig. 2
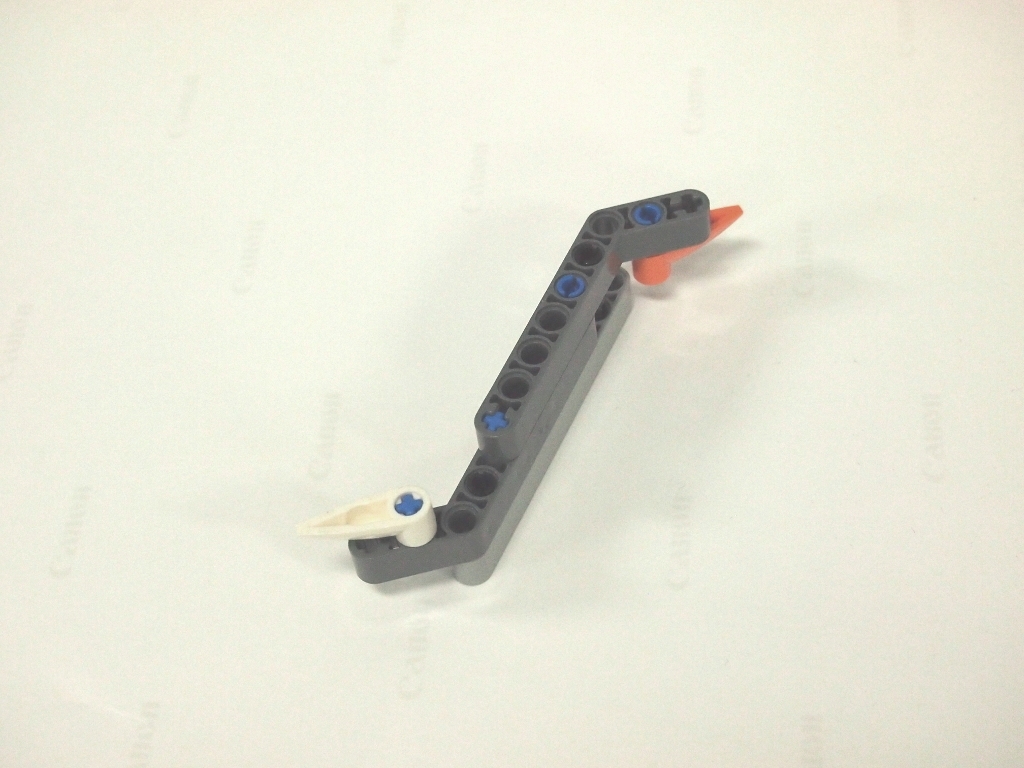
Fig. 3
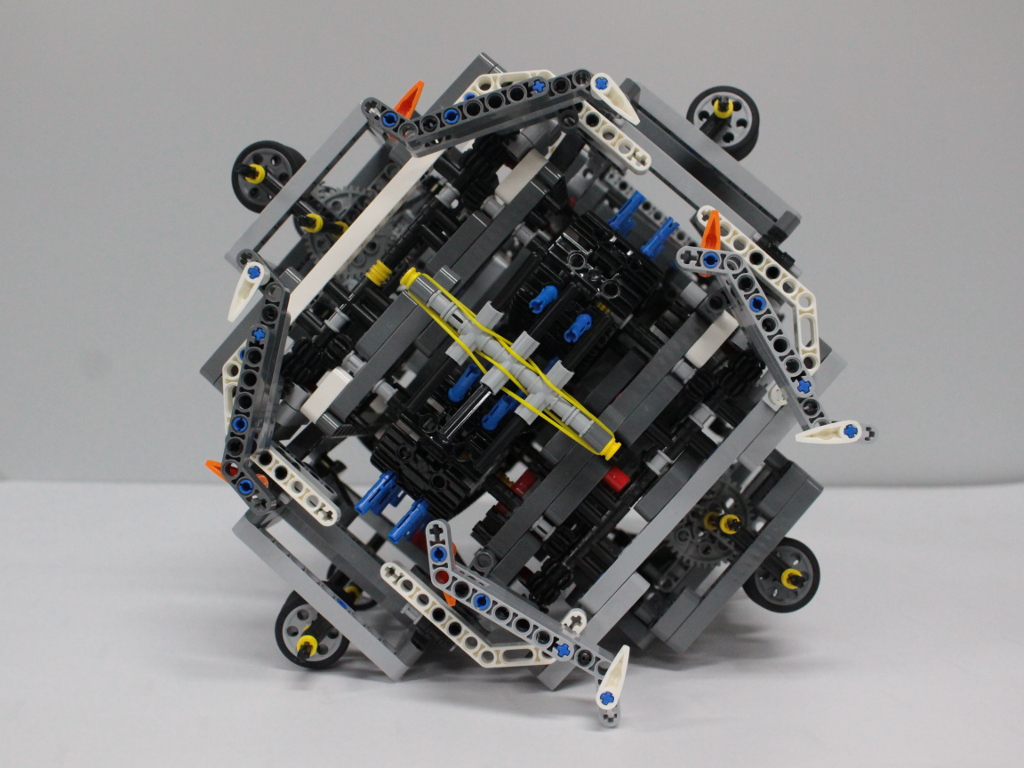
Fig. 4

Fig. 5
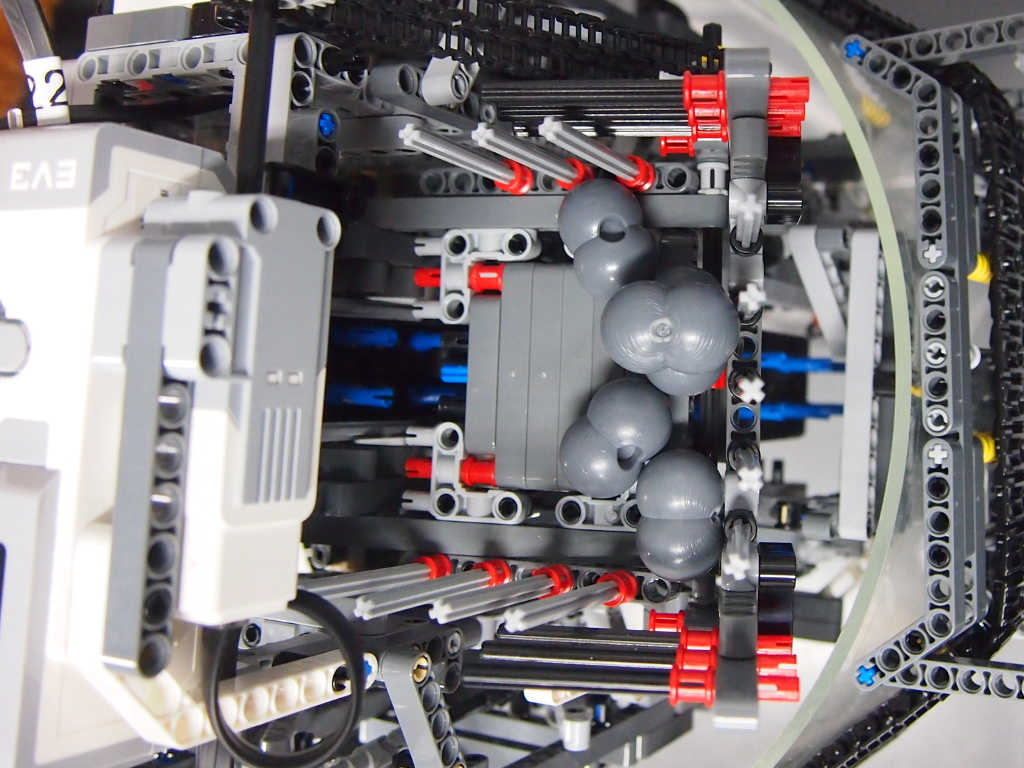
Fig. 6
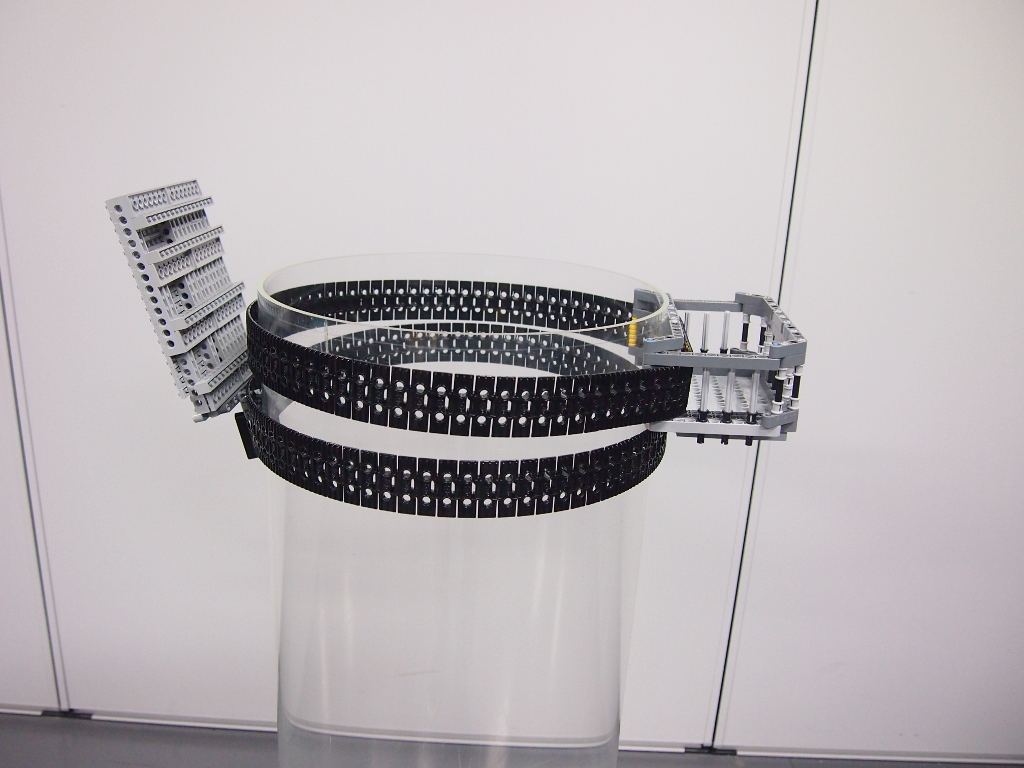
Fig. 7
機構における工夫点
・下降・上昇機構における工夫:
配管の下降や上昇時にはマシン全体が回転しながら下降と上昇を行うが、 それによりマシンが配管の底面に達した際に、その場でマシンが回転するようになっている。 そうすることで、より広範囲に亘って瓦礫回収用のクローラーが瓦礫の収集を行えるようになった。
・瓦礫回収機構における工夫:
瓦礫回収用のクローラーと瓦礫を排出機構まで運ぶベルトコンベアの動力を一つのモータで実現することができた。 それにより、ロボットのサイズをコンパクトに留めることができた。 また、ベルトコンベアの入口には坂が設けられており(Fig. 9)、スムーズに瓦礫がベルトコンベアに入っていけるようになっている。
・制御プログラムにおける工夫
ロボットが瓦礫を回収している最中に、瓦礫がベルトコンベアで挟まってロボットが動かなくなることがしばしばあった。 そのため定期的にモータを逆回転させることで詰まっている瓦礫を取り除くようにした。 また、瓦礫を配管の外に排出した後は、自動的に瓦礫の回収に再度向かうようにした。 これにより、電池が続く限り瓦礫を配管内から除去し続けることができる。
配管の下降や上昇時にはマシン全体が回転しながら下降と上昇を行うが、 それによりマシンが配管の底面に達した際に、その場でマシンが回転するようになっている。 そうすることで、より広範囲に亘って瓦礫回収用のクローラーが瓦礫の収集を行えるようになった。
・瓦礫回収機構における工夫:
瓦礫回収用のクローラーと瓦礫を排出機構まで運ぶベルトコンベアの動力を一つのモータで実現することができた。 それにより、ロボットのサイズをコンパクトに留めることができた。 また、ベルトコンベアの入口には坂が設けられており(Fig. 9)、スムーズに瓦礫がベルトコンベアに入っていけるようになっている。
・制御プログラムにおける工夫
ロボットが瓦礫を回収している最中に、瓦礫がベルトコンベアで挟まってロボットが動かなくなることがしばしばあった。 そのため定期的にモータを逆回転させることで詰まっている瓦礫を取り除くようにした。 また、瓦礫を配管の外に排出した後は、自動的に瓦礫の回収に再度向かうようにした。 これにより、電池が続く限り瓦礫を配管内から除去し続けることができる。
製作結果とその分析
最終的に配管から瓦礫を取り出す課題は達成できたが、いくつかの問題が残った。
まず一つとしては、マシンの底部の中心には瓦礫をベルトコンベアに進入させ易くするために坂が設けられているが、
そのせいでマシンの中心部の真下に瓦礫があった場合、
ロボット下降時に坂のパーツと地面に瓦礫が挟まれて瓦礫が回収できなくなる問題があった。
また、瓦礫の数が少なくなるとクローラーがベルトコンベアの入口まで上手く瓦礫を運んでくれず、
回収率が悪くなるという問題も発生した。これを改善するためには、クローラーの配置や形状をより工夫して、
瓦礫の数が少なくなっても確実にベルトコンベアの入口まで瓦礫が運び込まれるようにする必要がある。
感想
ロボットの制作には時間がかかったが、
なんとか課題を達成できるロボットを完成させることができて良かった。
作業中、何度もバグに直面しその度に自分の経験不足、知識不足、未熟さを痛感したが、
TAや他の研究室の方々、先生のアドバイスなどのおかげもあって、無事にバグを解決することができた。(満留)
一台ですべて完結させるというコンセプトだったが,3人で同時に開発をするというのが一つ困難だった。
また,機構学が本当に大切であることを痛感した。ロボテク(※東京大学工学部のロボットサークル)の人間や,
自分より経験豊富な先輩方,先生の発想力にはいつも驚かされた。
今後の自分のものづくりへの考え方を良い方向に変えてくれたと思う。(高倉)