
採用した戦略
戦略の美しさとして,できるだけ現実に即した状況でいかに無駄な動きをせず効率よく運搬を行うことを目標とし,
適切な条件を設定,ロボットに役割分担をさせることにした。
瓦礫をある平面から配管外に運搬するという状況の下では,平面と配管という,形状の異なる2種類のフィールドが存在する。
そこで平面・配管のそれぞれのフィールドに合わせた機構を持つ以下の2種類のロボットを製作した。
- A.平面瓦礫回収車:平面上で瓦礫を集め,配管内にいる配管瓦礫運搬車に瓦礫を受け渡す
- B.配管瓦礫運搬車:配管内を動き,平面瓦礫回収車から受け渡された瓦礫を配管出口まで運搬する
製作したロボットの概要
A.平面瓦礫回収車(大久保さん製作)
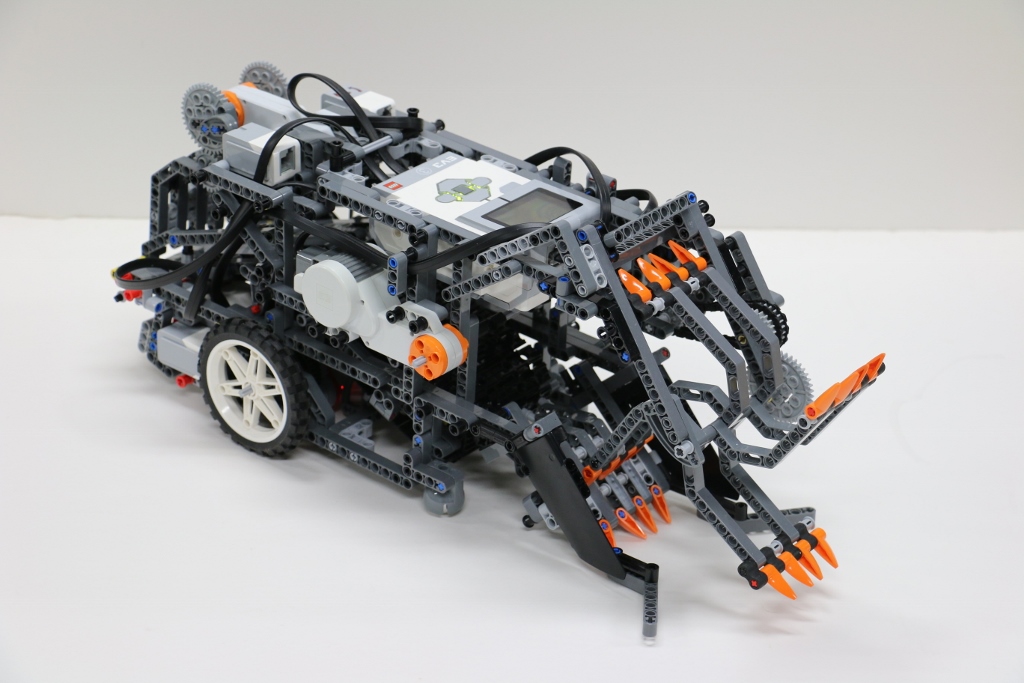
Fig. 1
モーターは左右のタイヤの駆動に1つずつ,車両先頭の水車機構の駆動に1つ,コンテナの開閉に1つ,計4つを装備した。
センサーは車両移動範囲の制御のためにジャイロセンサを1つ,配管入口を識別するために車両底部にカラーセンサを1つ, 配管入口接続時にコンテナを解放するためのタッチセンサを車両後部に2つ,計4つ装備した。
これらにより,以下の運動を実現した。
- 最初にジャイロセンサを調整しておく(地磁気や周囲の環境に合わせる)
- 配管入口から開始し,平面最右側を前進後退し,瓦礫を水車機構及びベルトコンベアにより内部のコンテナに格納
- 配管入口の少し前の平面に貼ってある黒色のテープをカラーセンサにより認識し,配管入口に車両後部を接続 この際,配管の縁が車両後部左右のタッチセンサに接触したことを認識してモーターを駆動させコンテナを解放
- 同様にして平面右側,最左側,左側を前進後退し,瓦礫をコンテナに格納し,その度に配管に接続,コンテナを解放
B.配管瓦礫運搬車(金山製作)
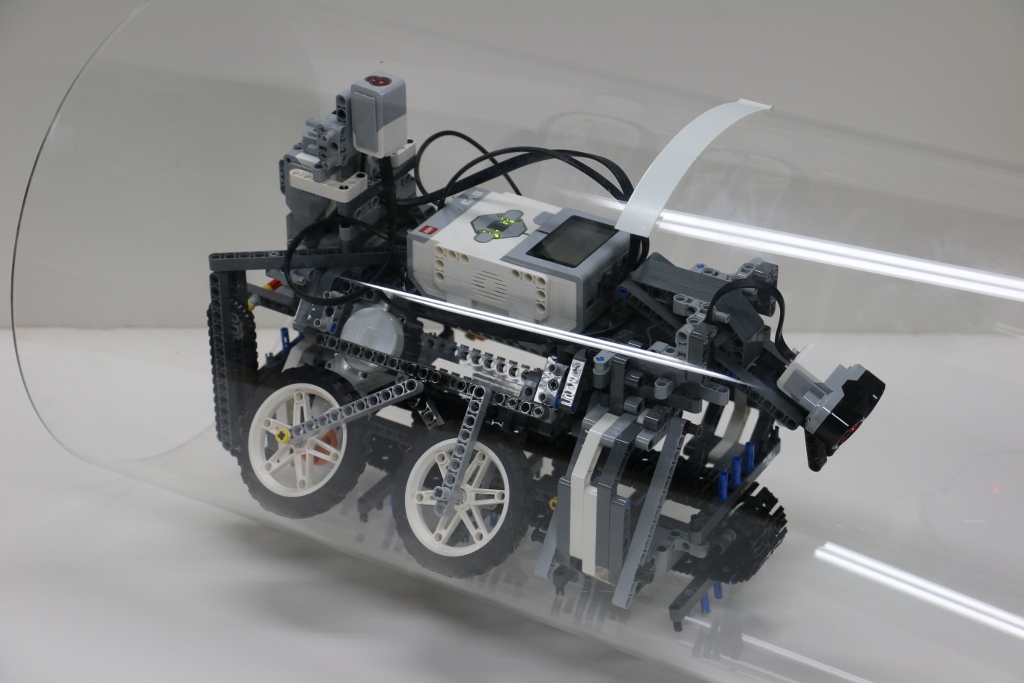
Fig. 2
- 平面瓦礫回収車が瓦礫を受け渡しに来るまでは配管入口前で待機(配管上部に貼られた白色テープをカラーセンサにより認識)
- 平面瓦礫回収車が配管入口に来て瓦礫を受け渡し再び離れる,この一連の動作を測距センサーにより感知
- 平面瓦礫回収車が配管入口から確実に離れたところで少し前進し,受け渡された瓦礫をベルトコンベアにより車体下に掻き込む
- ベルトコンベアで書き出しを行いながら配管出口(配管出口上部に貼られた緑色テープをカラーセンサにより認識)まで後退し,配管外へと瓦礫を掻き出す
- 配管出口にて数秒待機してしっかり瓦礫を掻き出したら,再び前進して配管入口(カラーセンサにより配管入口上部に貼られた白色テープを認識)まで移動し, 再び平面瓦礫回収車が瓦礫を受け渡しにくるまで待機
機構における工夫点
A.平面瓦礫回収車
- 水車機構,ベルトコンベアとの連動 (Fig. 3) 水車機構とベルトコンベアは掻き込む方向に常時回転させているため,チェーンを用いて連動させることで,動力源を1つのモーターにすることができた。
- 水車機構の歯及び掻き込み部分 (Fig. 4) 水車機構の歯にゴムのパーツを用いることで,瓦礫が掻き込み時に引っかかっても多少なら歯が曲がることによりモーターに過剰な負荷がかかることを減少させている。 また水車機構を4枚歯,そして掻き込み部分とかみ合うような機構にすることで取り込んだ瓦礫を取りこぼすことを防いでいる。
- タッチセンサ2つによるコンテナドアの開閉 (Fig. 5) タッチセンサを2つ用いて,両方が接触して初めてコンテナが解放されるようにすることで,常に配管入口に対してまっすぐ車両後部を接続してからコンテナを解放することができた。
- 配管入口接続時のジャイロセンサの調整 (Fig. 6) ジャイロセンサは時間が経つにつれて,周囲の影響により少しずつずれが生じてくる。 そこで車両後部を配管入口に接続する度,つまり配管入口に対して車両が垂直状態になる度に,ジャイロの調整を行うことで,ジャイロセンサの精度を一定の範囲にとどめることができた。
- 平面に対して横の移動には車両後部を先頭にする 今回のような縦長の車両で駆動部が後方にある場合,四角形の限られた平面内での移動には,駆動部である車両後部を先頭に動いた方が効率が良い。 なぜならば,駆動部を後方に動いた場合,90度の方向転換の都合上どうしても平面四角形のある程度内側までしか移動することができない。 そこで駆動部を先頭にして移動することで,90度の方向転換の際にも平面の枠のすぐ手前まで移動することができ,より広い範囲で瓦礫を回収することができる。
B.配管瓦礫運搬車
- タイヤをハの字に取り付けるためのトラス構造(車両中央)(Fig. 7) タイヤをハの字に取り付けるためには車両正面から見て左右両方に「く」の字型のパーツを用いる。 しかし単に本数を重ねるだけでは車両前後・ねじり方向に対して固定が弱いため,うまくレゴのポッチが収まるよう斜めに直線パーツをはめることでトラス構造を作った。 こうすることでタイヤをハの字型にしっかり固定をすることができた。
- 車体の剛性を高めるため,ボックス構造(車両中央)(Fig. 8) 車両の骨組みとして車両中央に長い直線を2本用いているが,それらに加えてマインドストーム本体, モーターを用いた両足構造を組み合わせてボックス構造を作ることにより,斜めやねじれの方向にも剛性を高めることができた。
- ベルトコンベアの歯 車両正面からみてベルトコンベアの中央に長めの歯,その左右に短めの歯をつけることにより,配管の曲線に沿った歯をつけることができた。 これにより配管底部にたまる瓦礫を確実に描きこむことができた。
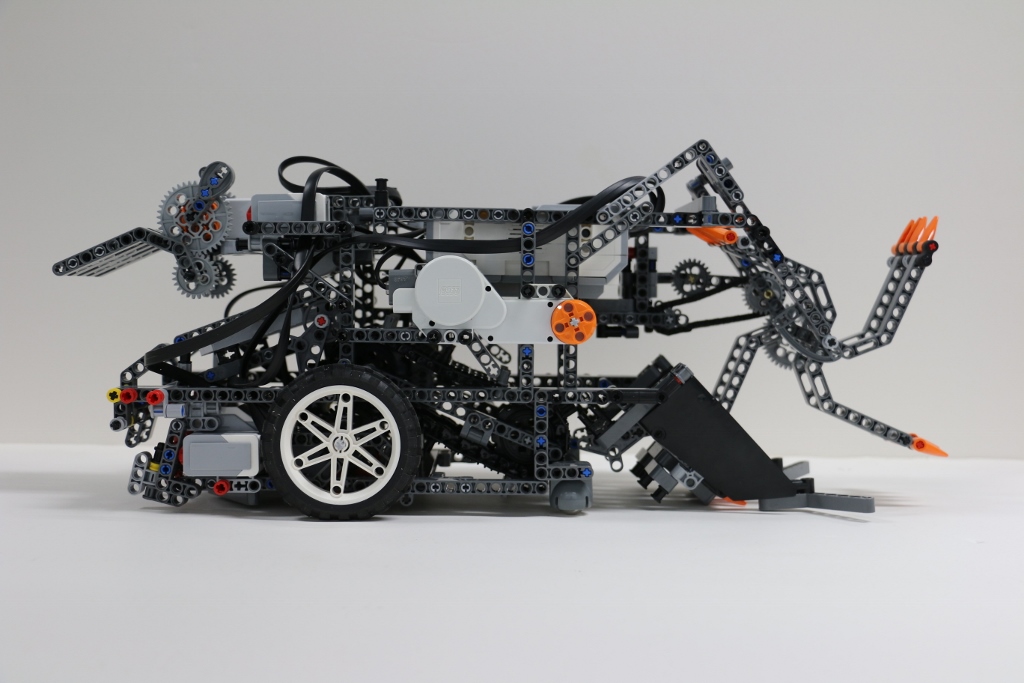
Fig. 3
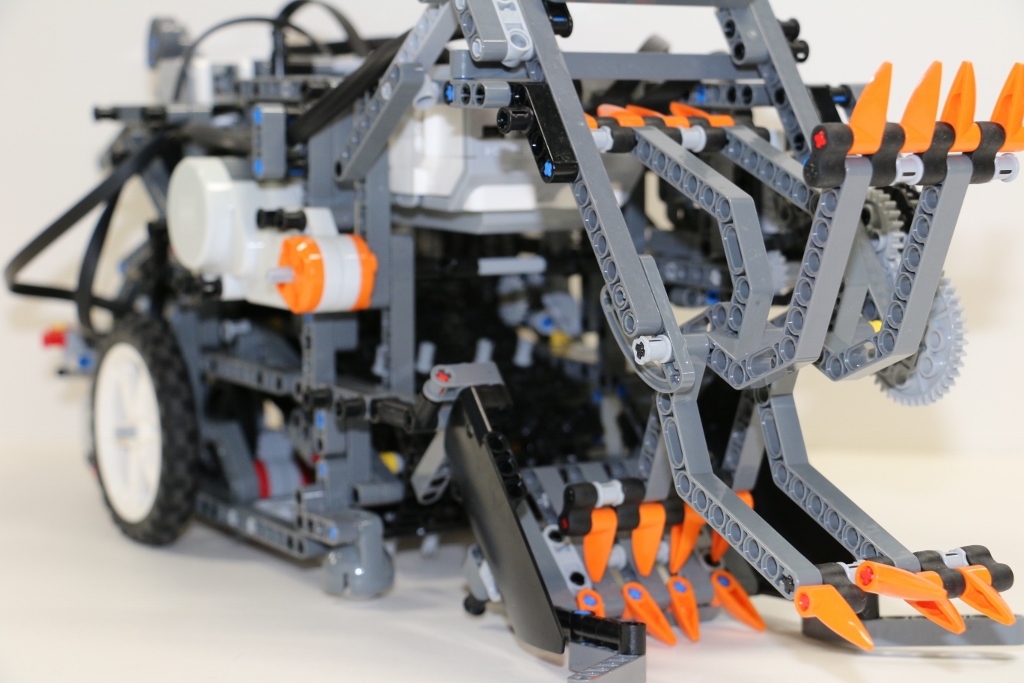
Fig. 5

Fig. 5

Fig. 6
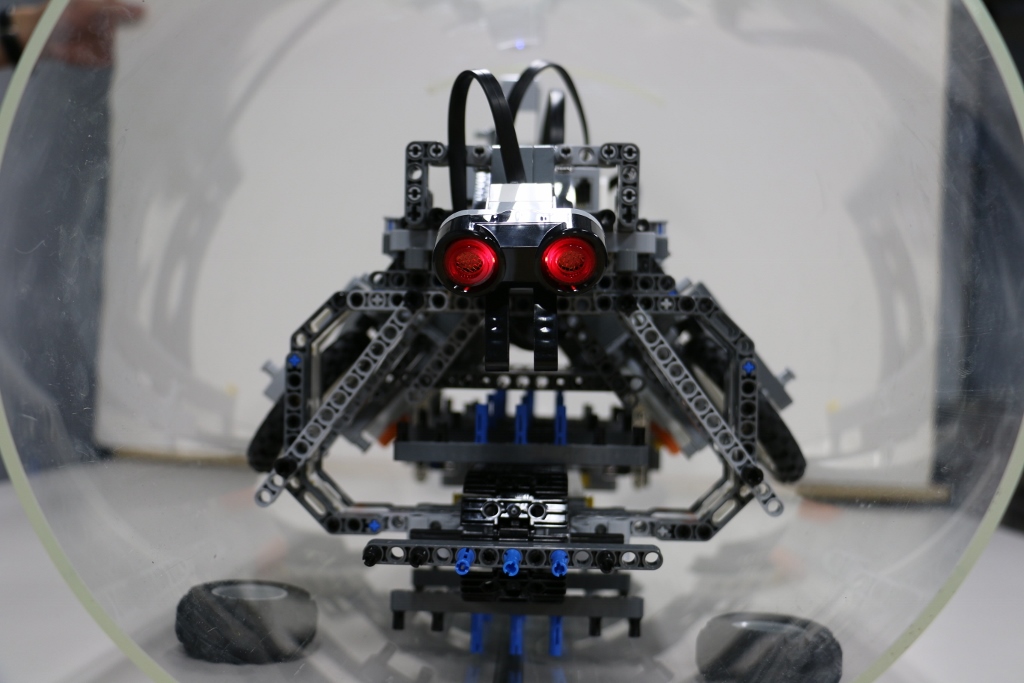
Fig. 7
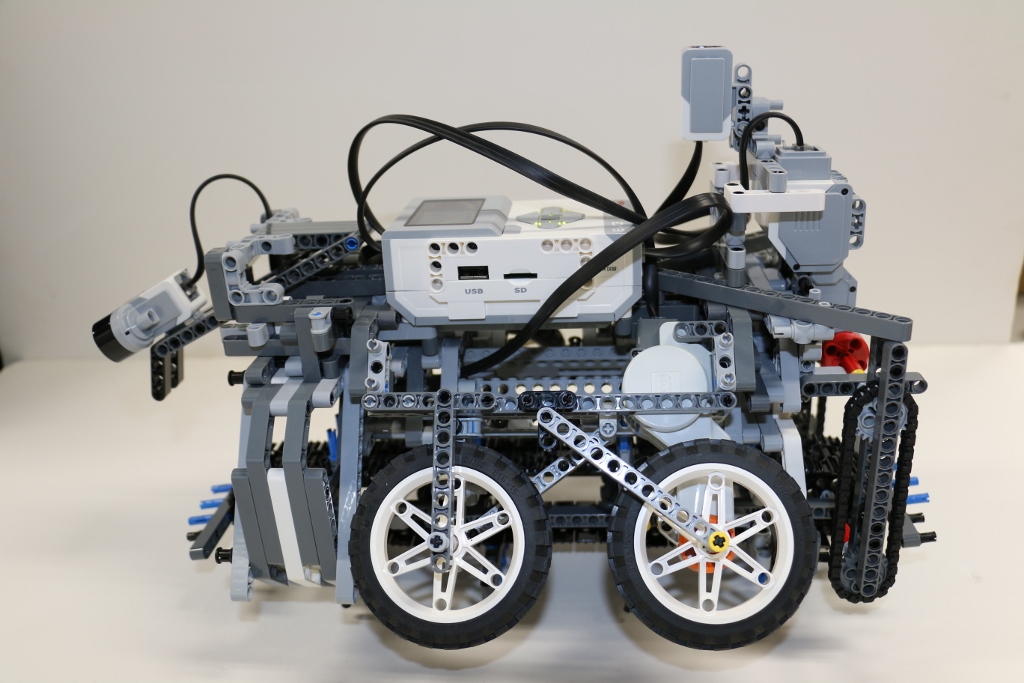
Fig. 8
製作結果とその分析
A.平面瓦礫回収車
平面フィールドのみの移動,ジャイロセンサを用いての動作範囲の制御,そしてカラーセンサによる配管入口への接続, タッチセンサによるコンテナの解放を行うことで,回収した瓦礫は確実に配管瓦礫運搬車に受け渡すことができた。 水車機構については,時々瓦礫が水車の掻き込み部分と筐体入口で引っかかってしまい, モーターに過剰な負荷がかかってしまうことがあった。 改善としては,水車機構の動力源であるモーターを水車機構により近づけて,大きなトルクがかかるようにすることで詰まりを解消できるのではないかと考えられる。B.配管瓦礫運搬車
配管内の前後方向のみの移動というシンプルな条件で車両の構造・駆動系をしっかり作ることができたため, 適切な測距センサーの設定・カラーセンサのための色テープの配置ができれば,受け渡された瓦礫をすべて配管出口へと掻き出すことができた。 ただしカラーセンサの色検知のタイミングの誤差により,まれにではあるが, わずかに前進または後退しすぎて後輪が配管出口から出てしまったり, 車両先頭のベルトコンベアの歯が配管の入口にひっかかってしまったりすることがあった。 そのため描きこみ・掻き出しのための十分な位置を,色テープでしっかり指示しておく必要がある。感想
このゼミを通じて戦略。設計から製作,プログラムの一連の仮定を手を動かすことで学習することができた。
適切な条件を設定し,2つのロボットに役割分担をさせることで課題をクリアすることができたように思う。
大久保さん作成の平面瓦礫回収車に関しては,機構やセンサーに多くの工夫があふれていて非常に勉強になった。
配管瓦礫運搬車について私は授業の中盤まではコの字型の車両を作成しようとしていため,
ハの字型に変更し一から作成し直すことになったが,正規授業時間外にも相当の時間をこのゼミに費やしたものの,
最終的には形にすることができてとても嬉しく思う。