
採用した戦略
今回の課題は大小の瓦礫の模型を所定のエリア1からエリア2まで運搬するロボットを作成するというもので、
運搬する模型のサイズや個数は自由で、課題設定も含めて『美しい戦略』を考えるというものであった。
課題を聞き、大小さまざまな瓦礫をできるだけ一度にたくさん運べるロボットこそ優れていると考えた結果、
二つの戦略が真っ先に思い付いた。その二つの戦略とは一つは瓦礫をプッシングしながら障害物を迂回する方法で、
もう一つは瓦礫を持ち上げて障害物を乗り越える方法である。前者に関しては自分のイメージと類似した作品が
すでに過去に作成されていたことや、瓦礫に丸みがあり持ち上げるのに適していると判断したことから、今回は後者の戦略を選択することにした。
製作したロボットの概要
製作したロボットの動きを写真とともに説明する。
1. ロボットが前進。車体前部のガイドに沿って瓦礫を移動させながら回転式の掻き込み機構で瓦礫を車体の中に掻きいれる。(Fig.1)
2. 車体が障害物の近くに来たら、Fig.2の状態からガイドを持ち上げて障害物に引っかからないようにFig.3の状態にする。
3. 障害物を乗り越えてエリア2に到着したらロボットが停止する。
以上の手順でロボットが瓦礫をエリア1からエリア2まで運搬する。 また、車体が障害物の近くに来た事とエリア2に到着した事の判断はいずれもコース上に予め設置されたマーカーを車体後方のフォトリフレクタがセンシングすることで行っている。(Fig.4)
1. ロボットが前進。車体前部のガイドに沿って瓦礫を移動させながら回転式の掻き込み機構で瓦礫を車体の中に掻きいれる。(Fig.1)
2. 車体が障害物の近くに来たら、Fig.2の状態からガイドを持ち上げて障害物に引っかからないようにFig.3の状態にする。
3. 障害物を乗り越えてエリア2に到着したらロボットが停止する。
以上の手順でロボットが瓦礫をエリア1からエリア2まで運搬する。 また、車体が障害物の近くに来た事とエリア2に到着した事の判断はいずれもコース上に予め設置されたマーカーを車体後方のフォトリフレクタがセンシングすることで行っている。(Fig.4)
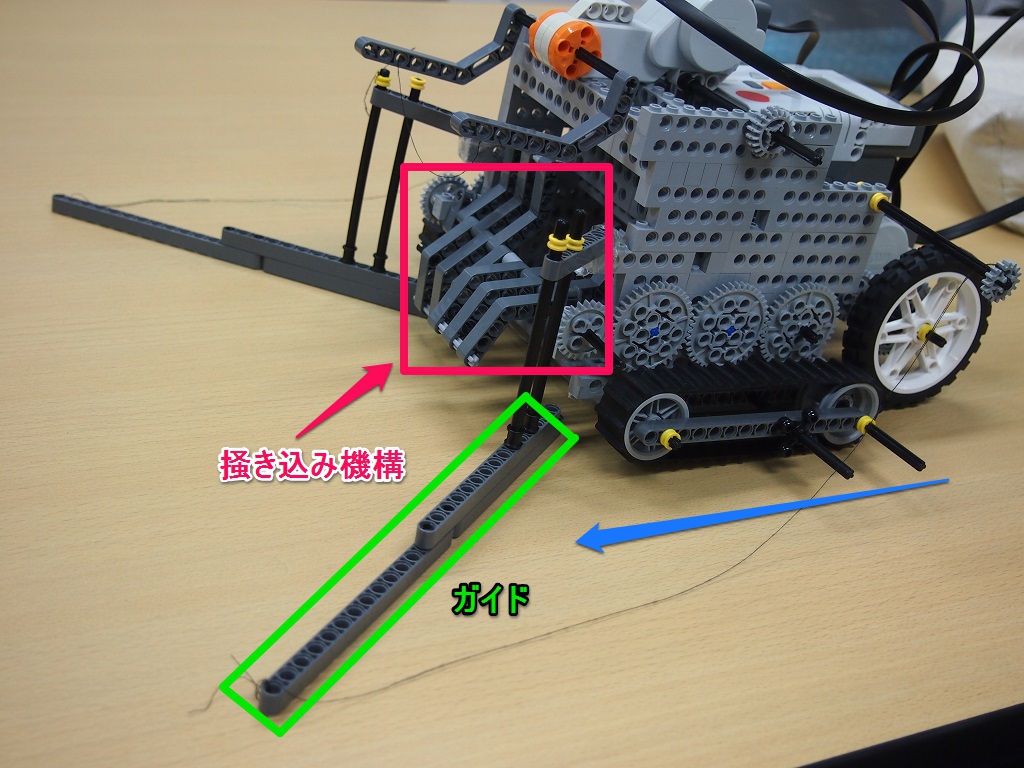
Fig. 1
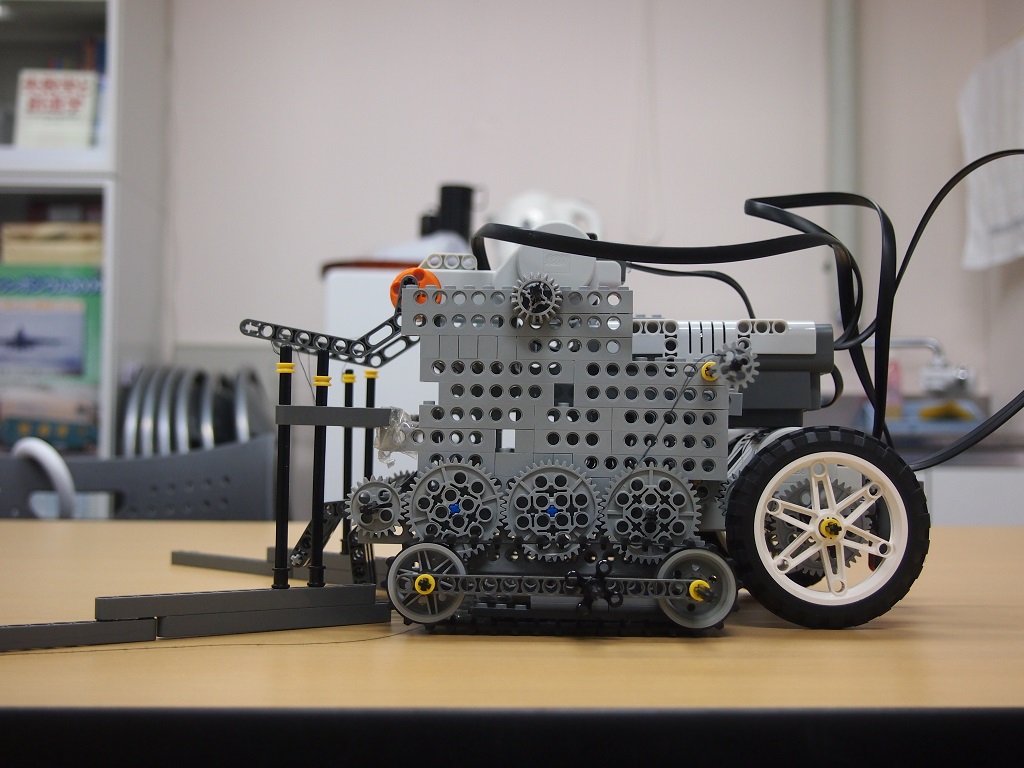
Fig. 2
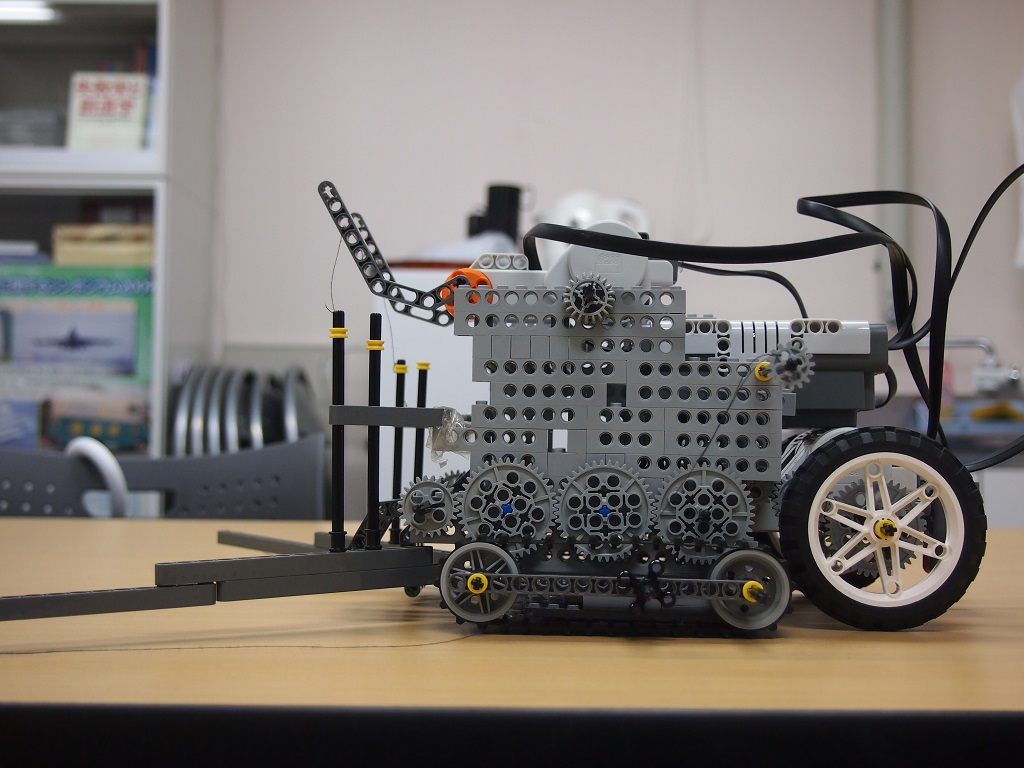
Fig. 3
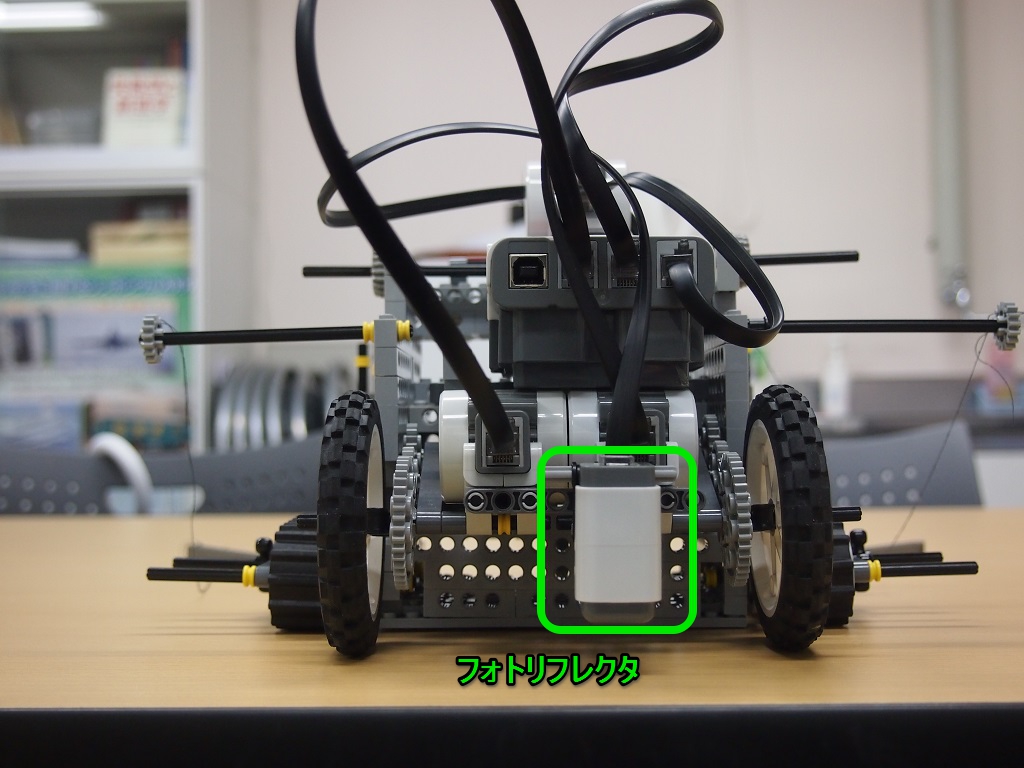
Fig. 4
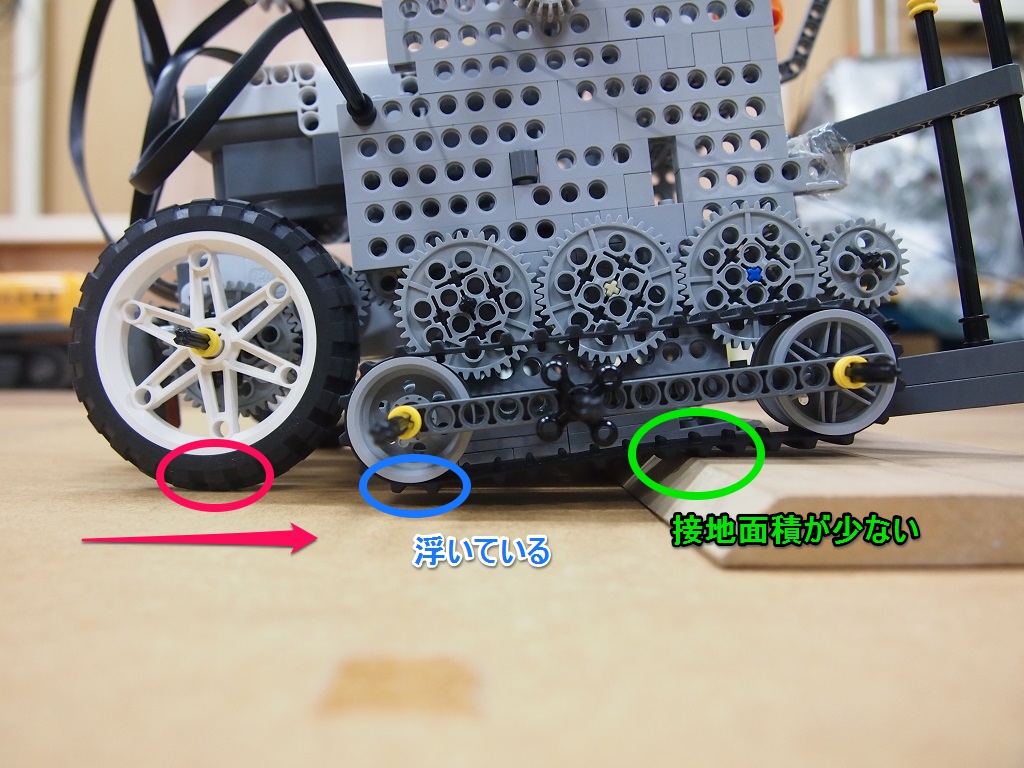
Fig. 5
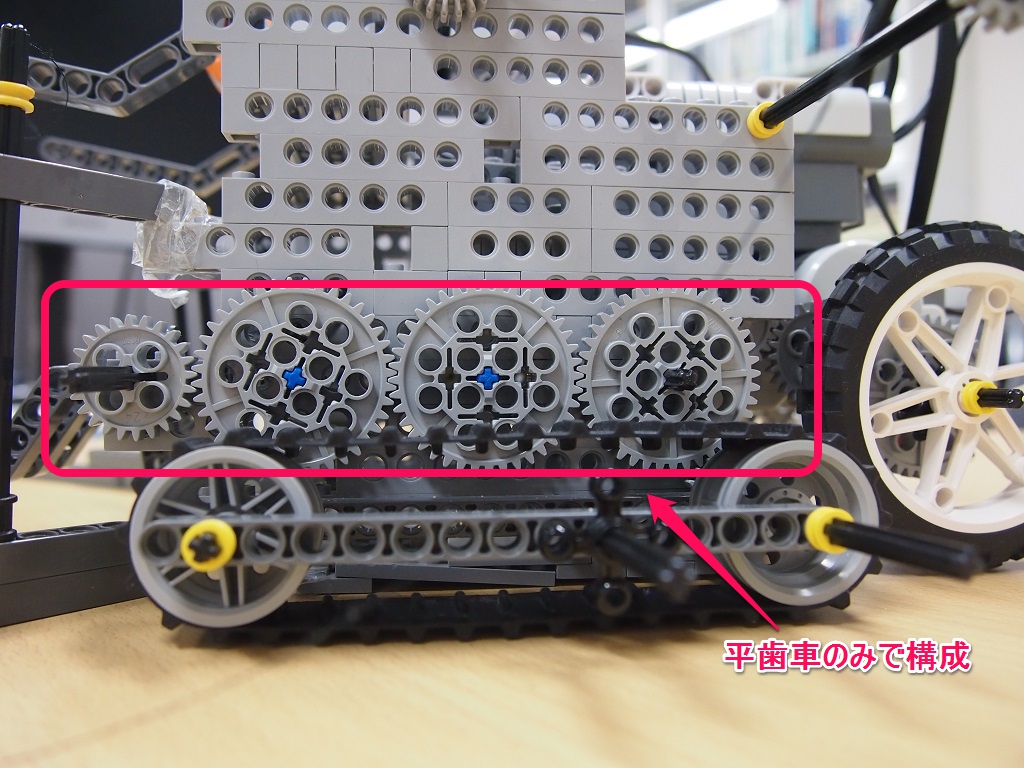
Fig. 6
機構における工夫点
機構における工夫点の1つは後部に取り付けたタイヤである。掻き込み式を採用した場合、
掻き込み先の籠部は地面すれすれに設定する必要があるが、四輪方式だと障害物を乗り越える際に籠部が
接触してタイヤが浮いてしまい進めなくなってしまうという現象が起きた。そこで対策としてクローラーを採用したのだが、
障害物を乗り越える際に接地面積が少なくなってしまい滑ってしまい進めなくなるという状況が起きた。
ここで考えられる解決策としては、ロボットを四輪に戻し、障害物を乗り越える前に籠部に対して
相対的に前輪を地面側に移動させるなどして四輪接地を保つようにする工夫をするという物が考えられるが、
新たに四輪接地を保つ機構を考えて実装する時間と能力の余裕がなかったということもあり、
今回は後部に補助のタイヤを付けるという解決策を考えた。この後輪は平地を走行する際には浮いているが、
接地面積が少なくなって登れなくなってしまうような状態になった時には接地して、後方から前進をサポートする。(Fig.5)
もう1つの工夫として挙げられるのは上下するガイドである。このガイドは車体の幅より広い範囲の瓦礫を集めて
掻きこめるようにする役割や、クローラーが瓦礫の上に乗り、車体が浮くということを防ぐ役割がある。
また、障害物を乗り越える際にガイドが下がったままだとガイドが障害物に接触し、
車体が目的地とは違う方向を向いてしまうといった事態が頻発するが、ガイドを持ち上げて接触しないようにすることで
車体を安定してエリア2に運ぶことができる。
また機構上の工夫として挙げるのは適当でないかもしれないが、掻き込み部が瓦礫を挟みこんでしまうなどの問題を起こさずに、
多くの瓦礫を運び込む為にはどうすればよいかということの調整に一番時間をかけて取り組んだ。
理論的にはどのようにすれば良いのかという知識がなかったため、ロボットの前進速度、掻き込み部の形状・取り付け位置・回転速度、
籠部の取り付け位置を何度も変更・テストし、成功確率の高いものを採用するという手法をとった。
製作結果とその分析
結果としては体感で8~9割程度の確率で、大小混じった状態で無作為に配置された瓦礫のほとんど全てエリア2まで運べるようになり、撮影、発表はともに一回でイメージに近い動きをすることができた。しかし、どうしても解消できなかった失敗や、作ってから気づいた改善できる点も多数あった。
まず解消できなかった失敗パターンとして挙げられるのは瓦礫を掻き込み部が挟んでしまう失敗が挙げられる。この問題に対する解決策としては掻き込み部にレゴではなく、より剛性の低く柔軟性のある素材を用いるという方法が考えられる。
次に改善すべき点としては以下の2点が挙げられる。第一の改善点は瓦礫を積み下ろす機構を搭載するに至らなかったことである。当初は漠然と車体後方を持ち上げよう等と考えていたが、フォトリフレクタやタイヤを車体後部に取り付けてしまったことなどもあり結局積み下ろしは断念してしまった。今思うと車体を持ち上げるのではなく、籠部後方を持ち上げて傾けるという発想で最初から作っていれば実現可能だったのではないかと思う。
第二の改善点としてはクローラーと掻き込み部の動力伝達の方法である。今回はFig.6のように平歯車のみで連結しているが、レゴの部品に傘歯車もあったので、傘歯車を有効に使えば連結に使う歯車の数を減らすことができた上、掻き込み部の取り付け位置の微調整も簡単にできたと考えられる。
感想
1つ問題が解決したと思ったら新たな問題が出てくるということの繰り返しで発表会までに完成するか非常に不安だったが、
何とか最終的に形になるものができて安心した。今回のロボットの製作では簡単な動作1つを実現することにも苦労し、
自分の経験不足と知識不足を実感したが、同時に製作段階の試行錯誤や、先生のアドバイス、
TAや他のゼミ参加者の戦略や製作過程を見る、といった事を通して機械設計の奥深さや楽しさに触れることができた。
今後もさらに機械設計を学び、楽しんでいきたいと思いました。