
採用した戦略
「架橋ロボットの開発」という課題から,まず架橋ロボットに要求される性能を考えた.
その結果「迅速であること」「正確であること」「手間を最小限とすること」「(設置された橋が)強固であること」「橋の長さがあること」の5点であると考えた.
これより,図1のような思考展開図を作成した.
ここで我々は,架橋が迅速で正確であり,かつ手間がかからないと言うことを重要な項目として捕らえた. つまり結果として得られる橋よりも,それを行なう動作に対してより重点を置いたともいえる. これはまた実のところ,片方の班の製作状況を考えた上で,差別化をはかることによるコンセプト勝ちを狙ったものでもある.
これらから,製作する架橋ロボットのコンセプトを「スマートな架橋ロボ」と設定した. より具体的には,適当に置いても自分で勝手に正しく橋を架けてくれるロボットである.
これより,図1のような思考展開図を作成した.
ここで我々は,架橋が迅速で正確であり,かつ手間がかからないと言うことを重要な項目として捕らえた. つまり結果として得られる橋よりも,それを行なう動作に対してより重点を置いたともいえる. これはまた実のところ,片方の班の製作状況を考えた上で,差別化をはかることによるコンセプト勝ちを狙ったものでもある.
これらから,製作する架橋ロボットのコンセプトを「スマートな架橋ロボ」と設定した. より具体的には,適当に置いても自分で勝手に正しく橋を架けてくれるロボットである.
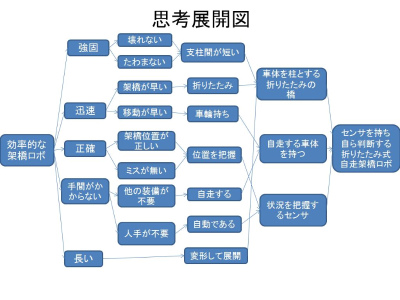
図1
製作したロボットの概要
まず架橋ロボットの外観を図2と図3に示す.それぞれ橋を格納した状態と展開した状態である.
このロボットは崖と崖の間に侵入し,その間に橋を架けることを目的としている.
それによってロボット自身が橋の柱となり,橋の強度を確保することも実現している.
ロボットの動作の流れであるが,これはまず崖と崖の間に侵入したことを自らで検知,次にその場で旋回して崖を探し,検知した崖が自身にとって左右どちら側の崖であるかを判断した上で,さらに崖に対して自身が垂直となるまで旋回し,崖に対する適切な距離を取って架橋を行なうと言うものである.
これを実現するセンサとして,赤外線センサと超音波測距センサを用いた. また,環境の設定として,崖と崖の間に黒い紙を敷いた.これを赤外線センサで探知することで,崖と崖の間への侵入を検知する.
測距センサは崖の探知及び崖に対する角度の判断,そして最後の崖との距離調整に用いられる,
具体的な手段としては,崖の検知は一定距離以下の障害物の検出によって行い,崖にたいする角度の判断は,ロボットが旋回しながら測距を行ない,距離が旋回とともにどのように変化したかによって判断する.
このロボットは崖と崖の間に侵入し,その間に橋を架けることを目的としている.
それによってロボット自身が橋の柱となり,橋の強度を確保することも実現している.
ロボットの動作の流れであるが,これはまず崖と崖の間に侵入したことを自らで検知,次にその場で旋回して崖を探し,検知した崖が自身にとって左右どちら側の崖であるかを判断した上で,さらに崖に対して自身が垂直となるまで旋回し,崖に対する適切な距離を取って架橋を行なうと言うものである.
これを実現するセンサとして,赤外線センサと超音波測距センサを用いた. また,環境の設定として,崖と崖の間に黒い紙を敷いた.これを赤外線センサで探知することで,崖と崖の間への侵入を検知する.
測距センサは崖の探知及び崖に対する角度の判断,そして最後の崖との距離調整に用いられる,
具体的な手段としては,崖の検知は一定距離以下の障害物の検出によって行い,崖にたいする角度の判断は,ロボットが旋回しながら測距を行ない,距離が旋回とともにどのように変化したかによって判断する.

図2

図3
機構における工夫点
まず架橋の機構であるが,クランクシャフトを用いた.
赤の矢印のようにモータの回転を,青の矢印のようにシャフトによって上下方向の移動に変え,それによって黄色の矢印のように橋を展開する(図4)
残念ながら可能なのは展開だけであり,回収することは出来ない. これはモータ数の制限に影響されるものである.
また足回りについては,左右の車輪にモータをそれぞれ接続することによって,その場での旋回を含む自由な移動を可能としており,コンセプトであるスマートな架橋ロボを実現する上での重要な部分である.
残念ながら可能なのは展開だけであり,回収することは出来ない. これはモータ数の制限に影響されるものである.
また足回りについては,左右の車輪にモータをそれぞれ接続することによって,その場での旋回を含む自由な移動を可能としており,コンセプトであるスマートな架橋ロボを実現する上での重要な部分である.
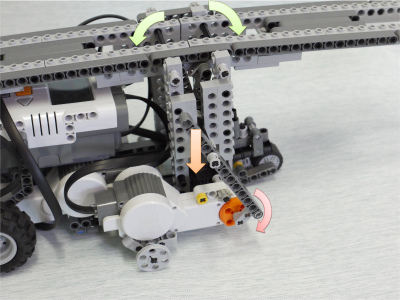
図4
製作結果とその分析
正確性を重視した本ロボットであったが,残念ながらそれが実現できたとはいえなかった.
もちろん他のロボットと比較した上での相対的な正確性は高かったが,それでも我々が満足する正確性ではなかった.
原因としては,測距センサの精度やノイズが大きいと考えられる. これが結局崖の探知や角度調整において問題となったと考えられる.
また架橋方法の問題から,橋格納時のロボットの全高がかなり高くなってしまっており,現実のスケールで考えると様々な運用上の問題が発生してしまうことも残念である.
これらの解決には,アクチュエータ及びセンサの増設が最低限必要であり,また橋の格納状態も例えば二段に折りたたまれた状態にすることなどが考えられる.
もちろん他のロボットと比較した上での相対的な正確性は高かったが,それでも我々が満足する正確性ではなかった.
原因としては,測距センサの精度やノイズが大きいと考えられる. これが結局崖の探知や角度調整において問題となったと考えられる.
また架橋方法の問題から,橋格納時のロボットの全高がかなり高くなってしまっており,現実のスケールで考えると様々な運用上の問題が発生してしまうことも残念である.
これらの解決には,アクチュエータ及びセンサの増設が最低限必要であり,また橋の格納状態も例えば二段に折りたたまれた状態にすることなどが考えられる.
感想
池田君
レゴは不慣れであったのでなかなかに苦戦したところがあった.さらに片方の班がレゴが得意な人でもあったのでなかなかにプレッシャーがかかってしまった.
レゴは規格化されているため製作しやすい面もあるものの,同時に融通が利かない面も持っているため,苦労した.
とはいえやはり自分で考えて設計し,ロボットを製作していくことは楽しく,また先生やTAさんも非常に親切で楽しい人だったのでこのゼミはおもしろかった.
レゴは不慣れであったのでなかなかに苦戦したところがあった.さらに片方の班がレゴが得意な人でもあったのでなかなかにプレッシャーがかかってしまった.
レゴは規格化されているため製作しやすい面もあるものの,同時に融通が利かない面も持っているため,苦労した.
とはいえやはり自分で考えて設計し,ロボットを製作していくことは楽しく,また先生やTAさんも非常に親切で楽しい人だったのでこのゼミはおもしろかった.
カン君
レゴマインドストームプログラミングはすごく面倒だったし中処理が遅くて簡単なプログラムなら使いやすいけど今回作ったロボットの各センサ情報が重ねているのでわりと複雑なものとなってしまった.
創造したロボットと実際にできたものは若干違ってうまく動くようにするのは難しかった. プログラミング担当なので各パラメータを微調整するのは面倒だった.
レゴマインドストームプログラミングはすごく面倒だったし中処理が遅くて簡単なプログラムなら使いやすいけど今回作ったロボットの各センサ情報が重ねているのでわりと複雑なものとなってしまった.
創造したロボットと実際にできたものは若干違ってうまく動くようにするのは難しかった. プログラミング担当なので各パラメータを微調整するのは面倒だった.