
採用した戦略
架橋ロボットの性能指標として、遠くの対岸に対して架橋できる伸長性と高荷重に耐えられる橋梁の剛性の二点に注目した.
折りたたまれた橋梁を単純に展開する方式が現実の戦車橋には採用されているが、これは予め設定された展開長以上に橋梁を伸長出来ず、必ずしも架橋性能が高いとは言えない. また、展開機構の可動部が必然的に強度不足に陥りやすく、機構的制約のもとで橋梁の剛性設計をせねばならないという難点がある.
一方で、橋梁をモジュール化して組み立てる方式ならば、対岸との距離に応じて任意の長さに橋長を調節することが出来る. また、橋梁の伸長と剛性を切り離して設計することが可能であるためデザインの自由度が高い.我々はこの組立方式を採用した.
折りたたまれた橋梁を単純に展開する方式が現実の戦車橋には採用されているが、これは予め設定された展開長以上に橋梁を伸長出来ず、必ずしも架橋性能が高いとは言えない. また、展開機構の可動部が必然的に強度不足に陥りやすく、機構的制約のもとで橋梁の剛性設計をせねばならないという難点がある.
一方で、橋梁をモジュール化して組み立てる方式ならば、対岸との距離に応じて任意の長さに橋長を調節することが出来る. また、橋梁の伸長と剛性を切り離して設計することが可能であるためデザインの自由度が高い.我々はこの組立方式を採用した.
製作したロボットの概要
本機は、胴体内に収納された橋モジュールを展開し組み立てることにより橋を作り、それを谷に架けるロボットである.
本機に搭載されたモジュールをすべて使用することで70センチメートル程度の橋を1分程度で架橋することができる(Fig.2.1).
本機はサーボモータを3機搭載し、それぞれがロボットの移動、固定用ピンの繰り出し(Fig.2.2)、リールの操作(Fig.2.3)に用いられている.
橋モジュールは、橋桁パーツ(Fig.2.4)と固定用ピン(Fig.2.5)によって構成されている.本機には、橋桁パーツが6個、固定用ピンは5個搭載されている.
本機の行う組み立ての手順は、本機が後退した後に前進することで橋脚パーツが自由落下し、既に地面に接地しているパーツと接続される. その後、ラックピニオン機構を用いて横から固定用ピンを挿入することで、前後の橋桁パーツを接続する(Fig.2.6.1,Fig.2.6.2).ピンを挿入する制御はオープンループ制御で行う. 上記の動作を5回繰り返すことで橋桁を完成させる(Fig.2.7).
橋桁が完成した後、リールを巻き取りを行うことで糸の張力により橋を持ち上げ(Fig.2.8)、本機が前進することで谷の間に橋桁を渡す. 崖に到達したことは接触センサにより判定する(Fig2.9). リールの回転で張力を弱めることで架橋を完了する. その後、本機が後退することで橋を独立させる.
本機はサーボモータを3機搭載し、それぞれがロボットの移動、固定用ピンの繰り出し(Fig.2.2)、リールの操作(Fig.2.3)に用いられている.
橋モジュールは、橋桁パーツ(Fig.2.4)と固定用ピン(Fig.2.5)によって構成されている.本機には、橋桁パーツが6個、固定用ピンは5個搭載されている.
本機の行う組み立ての手順は、本機が後退した後に前進することで橋脚パーツが自由落下し、既に地面に接地しているパーツと接続される. その後、ラックピニオン機構を用いて横から固定用ピンを挿入することで、前後の橋桁パーツを接続する(Fig.2.6.1,Fig.2.6.2).ピンを挿入する制御はオープンループ制御で行う. 上記の動作を5回繰り返すことで橋桁を完成させる(Fig.2.7).
橋桁が完成した後、リールを巻き取りを行うことで糸の張力により橋を持ち上げ(Fig.2.8)、本機が前進することで谷の間に橋桁を渡す. 崖に到達したことは接触センサにより判定する(Fig2.9). リールの回転で張力を弱めることで架橋を完了する. その後、本機が後退することで橋を独立させる.

Fig. 2.1
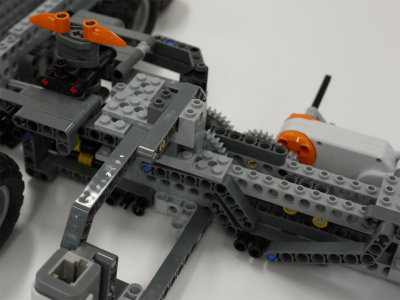
Fig. 2.2
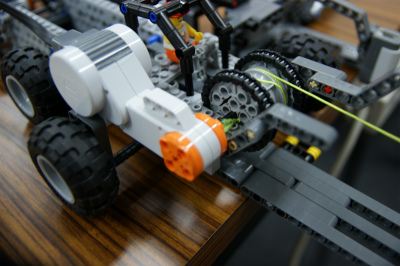
Fig. 2.3
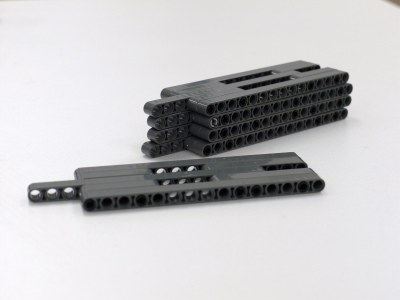
Fig. 2.4

Fig. 2.5
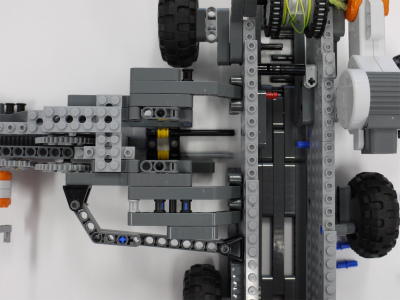
Fig. 2.6.1
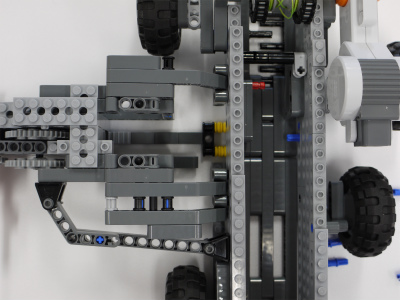
Fig. 2.6.2
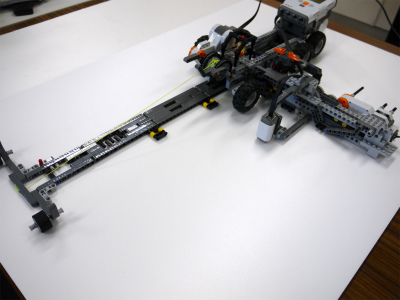
Fig. 2.7

Fig. 2.8
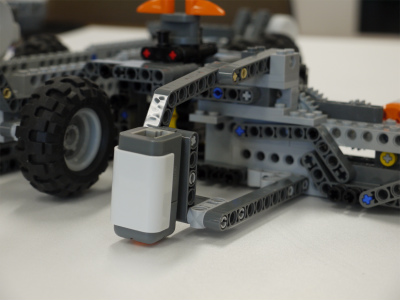
Fig. 2.9
機構における工夫点
マインドストームのセットにはモータが3つしか用意されておらず、適切に自由度を割り振らねば複雑な機構の実装は叶わない.
我々はモジュールの再装填・位置合わせ・移動の三機構を駆動部の1モータで実現することで、所望の機能を実現した.
橋長が長くなると先端が下に垂れてきて対岸に載せることが困難になる. 本機では橋桁先端にワイヤを取り付け、橋長にあわせて本体側から巻き取ることでこれを解決した. この機構により対岸の高さに対して柔軟に対応できるようにもなっている.
橋桁は積載量を多くするために薄型化し、橋桁間の接続はピンを打ち込むことで実現した. (Fig.3.1)
ピンの打ち込みには橋桁とピンの正確な位置合わせが必要であり、実装には工夫が必要だった. 橋桁同士の位置合わせは形状の凹凸と本体の後退/前進を利用した確実なはめ込みを用いた. ピンの打ち込み用の直動機構にはラックアンドピニオン機構を採用した. トルクを十分大きくすることで多少の位置のズレを補正して打ち込むことが可能である.
橋長が長くなると先端が下に垂れてきて対岸に載せることが困難になる. 本機では橋桁先端にワイヤを取り付け、橋長にあわせて本体側から巻き取ることでこれを解決した. この機構により対岸の高さに対して柔軟に対応できるようにもなっている.
橋桁は積載量を多くするために薄型化し、橋桁間の接続はピンを打ち込むことで実現した. (Fig.3.1)
ピンの打ち込みには橋桁とピンの正確な位置合わせが必要であり、実装には工夫が必要だった. 橋桁同士の位置合わせは形状の凹凸と本体の後退/前進を利用した確実なはめ込みを用いた. ピンの打ち込み用の直動機構にはラックアンドピニオン機構を採用した. トルクを十分大きくすることで多少の位置のズレを補正して打ち込むことが可能である.
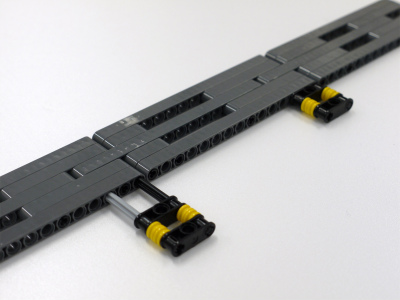
Fig. 3.1
製作結果とその分析
製作結果
既に完成した状態で折り畳まれた橋をロボットが展開する方式では、掛けられる橋の全長がロボットの大きさに依存し、与えられた資材ではそれなりの長さの橋しか掛けることはできないと考えられた. そのため我々のチームでは、モジュール化されたパーツをロボット自身が組み立てて橋を完成するロボットを目指した. 実際に作成してみてロボットが現場で橋を作成し、それを架橋するという目標は達成できたと考えられるが、時間やパーツの都合上完全な動作を実現するには至らなかった. この様な機械は、現実では戦争時や災害時に活躍する機械なので確実な動作を実現しなければならない.
既に完成した状態で折り畳まれた橋をロボットが展開する方式では、掛けられる橋の全長がロボットの大きさに依存し、与えられた資材ではそれなりの長さの橋しか掛けることはできないと考えられた. そのため我々のチームでは、モジュール化されたパーツをロボット自身が組み立てて橋を完成するロボットを目指した. 実際に作成してみてロボットが現場で橋を作成し、それを架橋するという目標は達成できたと考えられるが、時間やパーツの都合上完全な動作を実現するには至らなかった. この様な機械は、現実では戦争時や災害時に活躍する機械なので確実な動作を実現しなければならない.
改善点
・ピン打ち失敗時のリカバー
橋梁は先端から組み立てていく都合上、一箇所ピン打ちに失敗すればそれ以降の橋梁部はすべて使用できない. 失敗時にそれを検出して再度打ち込みを行う機構を実装すべきである.
・机の表面性状に影響される
橋梁の位置合わせを机面で行い、先端部のゴムをストッパーに使っている. そのため、机面の表面性状によって架橋の成否に影響が出る.位置合わせ機構の抜本的見直しが求められる.
・ピン打ち失敗時のリカバー
橋梁は先端から組み立てていく都合上、一箇所ピン打ちに失敗すればそれ以降の橋梁部はすべて使用できない. 失敗時にそれを検出して再度打ち込みを行う機構を実装すべきである.
・机の表面性状に影響される
橋梁の位置合わせを机面で行い、先端部のゴムをストッパーに使っている. そのため、机面の表面性状によって架橋の成否に影響が出る.位置合わせ機構の抜本的見直しが求められる.
感想
小川君
マインドストームを活用することで、手軽にロボット製作と制御プログラムを製作することができた. 今までの大学での講義を振り返っても、ロボットを一貫して設計、製作することは無かったのでいい経験になったと思う. レゴを用いてロボットを作るのは、いろいろな設計を試せる利点がある一方で、細かい位置合わせなどが難しいと感じられた. また、レゴの部品は剛性が低く、パーツ数も限られていたので、橋の剛性を維持しながらのパーツの遣り繰りに苦心した.
マインドストームを活用することで、手軽にロボット製作と制御プログラムを製作することができた. 今までの大学での講義を振り返っても、ロボットを一貫して設計、製作することは無かったのでいい経験になったと思う. レゴを用いてロボットを作るのは、いろいろな設計を試せる利点がある一方で、細かい位置合わせなどが難しいと感じられた. また、レゴの部品は剛性が低く、パーツ数も限られていたので、橋の剛性を維持しながらのパーツの遣り繰りに苦心した.
高橋君
毎日レゴで遊ぶだけで単位がくるとはこんな素敵なゼミは他にない. 朝からレゴを組み立てていると夢のように時間は流れ、気がつけば夜ということもあった. 他の講義も全部こんな感じだったらきっと大学生活はもっと楽しくなるのではないか.
毎日レゴで遊ぶだけで単位がくるとはこんな素敵なゼミは他にない. 朝からレゴを組み立てていると夢のように時間は流れ、気がつけば夜ということもあった. 他の講義も全部こんな感じだったらきっと大学生活はもっと楽しくなるのではないか.