
完成したロボット
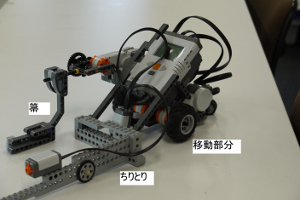
採用した戦略 課題の理解について
ハード面について
マインドストームのモーターは3つしかなく、2つは移動に使うと考えると、1つのモーターしか使えないことになる。1自由度でドミノを持ち上げること(ホールディングなど)はなかなか複雑で難しくなってしまう。そこで、単純にドミノをショベルカーのようにプッシングして運ぶということが考えられる。こうすることで基本的に2つのモーターですむことになる。さらに、余った1つのモーターを使い、周りに散らばっているドミノをちりとりのようにかき集めることにした。今回はこのようなちりとり型機構を戦略として採用した。
ソフト面について
スタートとゴールのあいだには大きな段差があり、ちりとり型ロボットではまっすぐ進むとドミノが大量にこぼれ、また段差を越えられない可能性が出てくる。そこで、横の隙間を通ることにした。そこを通る制御法は、大きく2つ考えられる。まず、最初にゼミの講義の中でやったライントレースである。これは、スタートとゴールのあいだに黒い線を引いていき、そこをたどっていくやり方である。このやりかただとスタート地点が多少違ってもゴールにいくことができ、ある程度融通がきくが、動きのブレが大きくて隙間をうまく通り抜けられないことが多くあった。次の方法が完全にスタートの位置を固定して、センサーなどを用いずモーターを決めた通りに動かすだけで進むやり方である。この方法は少しでもスタート位置がずれたらうまくいかず融通が利かないが、ブレが少なく進むことができる。最終的に、ライントレースでは隙間をうまく通ることができなかったので、後者の方を戦略として採用することにした。
制作したロボットの概要
制作したロボットの動きは、
まず箒があがる (Fig.1)
次に箒が下がりドミノを集める(Fig.2)
そして前に進む(Fig.3)
というシンプルな動きにした

Fig.1
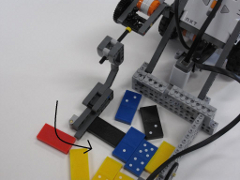
Fig.2
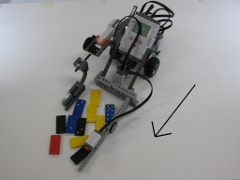
Fig.3
機構における工夫点
ロボットの基本的にはちりとり部分、箒部分、移動部分からなる。ちりとり部分はできるだけ多くのドミノが入るようにできるだけ大きく、またあまり重くならないように調整した。箒部分はできるだけ軽くしてトルクが少なくても回るようにし、一番低くしたとき高さがちょうど地上になるように調整した。また、タイヤをとりつけてスムーズにうごくようにした。移動部分は基本的にマインドストームの説明書の通りである。写真にはのっていないがタイヤの下にドミノが入らないようにドミノ避けをつけた。
制作結果と分析
上記のとおりに作った結果、最高で10数個は運べるようになった。だが、いろいろと不備が発見された。まず、ちりとりが小さくて全部は運べないということである。それを解決するためにちりとりを大きくすると、隙間を通り抜けることができなくなる。こうしたジレンマのため、そのままにせざるを得なかった。また、箒がドミノにつっかえてしまい回らなくなるという不具合も生じた。これも単純にちりとりが小さいということである。これらのことから、やはりデザインをもう少しこだわるべきであったということが考えられる。
感想
今回、測距センサやタッチセンサや光センサなど様々なセンサがマインドストームには入っていたので、一つずつ試して行きました。しかし結局どれも安定した結果が得られなっかったため、採用しませんでした。もうちょっと工夫してセンサを一つでも使えばよかったです。マインドストームは子供向けということで、とても扱いやすかったです。しかし、複雑な動きをさせるには限界があったので、pythonに挑戦してみればよかったと思いました。自分でロボットを作るのはほぼ初めてだったので、大変なことがいろいろありましたが、いい経験になりました。