
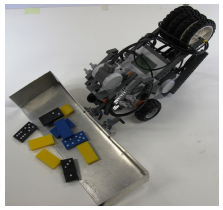
製作したロボット
採用した戦略
今年の課題は「ドミノ20個をエリア1からエリア2まで運搬する」でした。課題と作業エリアの
図面を見た後で、なるべく早く、安定して、多くのドミノを運搬するのを目的としました。そのため、ドミノを運ぶ機能だけに注目して、ほかの機能をあまり考えずに進んで、計画を立てました。
まず、できるだけ早くドミノを運搬するためにLEGO ロボットによって、ドミノを一個ずつ(又は
一回ごとに多数のドミノずつ)を掴んで、モータの出力でドミノをエリア1からエリア2に投げる方法を考えました。この時、ロボットはあまり移動しないで、ドミノだけを移動させるので時間的にかなり効率のよい方法だと思っていました。しかし、この方法には大きな弱点が存在しました。このやり方でドミノを運搬すると、あまり安定しなかったのです。投げられたドミノが必ずしもエリア2に入るとは限らないので、結局、安定に、多くドミノを運ぶという目的を果たせませんでした。
そのため、安定に、多くドミノを運ぶ目的のためには、一番良い方法はロボットがドミノ
を運びながらエリア1からエリア2まで運搬する方法と考えました。そして、早く運搬するために、ロボットに無駄な動きをさせないように一番簡単なルート(直線にそって障害物を乗り越えて移動する)を選びました。また、障害物を利用してドミノを獲得することを考え、ロボットにチリトリをつけました。前半、ロボットはエリア1でドミノを全部チリトリに入れ(障害物により)その後、モータでチリトリを持ち上げてからロボットはまっすぐに進んで、障害物を乗り越えてエリア2までに移動します。
図面を見た後で、なるべく早く、安定して、多くのドミノを運搬するのを目的としました。そのため、ドミノを運ぶ機能だけに注目して、ほかの機能をあまり考えずに進んで、計画を立てました。
まず、できるだけ早くドミノを運搬するためにLEGO ロボットによって、ドミノを一個ずつ(又は
一回ごとに多数のドミノずつ)を掴んで、モータの出力でドミノをエリア1からエリア2に投げる方法を考えました。この時、ロボットはあまり移動しないで、ドミノだけを移動させるので時間的にかなり効率のよい方法だと思っていました。しかし、この方法には大きな弱点が存在しました。このやり方でドミノを運搬すると、あまり安定しなかったのです。投げられたドミノが必ずしもエリア2に入るとは限らないので、結局、安定に、多くドミノを運ぶという目的を果たせませんでした。
そのため、安定に、多くドミノを運ぶ目的のためには、一番良い方法はロボットがドミノ
を運びながらエリア1からエリア2まで運搬する方法と考えました。そして、早く運搬するために、ロボットに無駄な動きをさせないように一番簡単なルート(直線にそって障害物を乗り越えて移動する)を選びました。また、障害物を利用してドミノを獲得することを考え、ロボットにチリトリをつけました。前半、ロボットはエリア1でドミノを全部チリトリに入れ(障害物により)その後、モータでチリトリを持ち上げてからロボットはまっすぐに進んで、障害物を乗り越えてエリア2までに移動します。
製作したロボットの概要
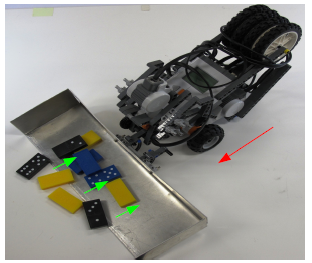
ロボットを前に進んでドミノをチリトリに入れる
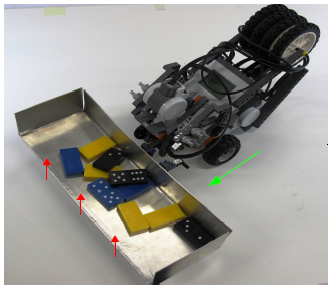
ドミノを持ち上げてまっすぐに進む
ドミノ20個を一回で全部運搬するのを目的としました(なるべく早く運べるように)。そのために、チリトリの丈夫さが充分であり、モータの出力を適切に使う必要があります。
チリトリの寸法は、機能と重さのバランスを考えて決める必要がありました。ドミノはエリア1にランダムに置いてあるので、全部20個をチリトリに入れるためにチリトリの幅はエリア1の直径と等しくしました。そして、チリトリを軽くするために、素材は薄いアルミニウム板で、長さを適切にしました。
もう一つの工夫点はチリトリ用のモータの付ける位置です。LEGO MindStorm は3 つしかありませんが、ロボットを移動するために2個使ったので、チリトリを持ち上げるためのモータを一つしか使えませんでした。そして、ドミノを持ち上げながら移動する時重力でチリトリが下がるのを防ぐため、このモータの出力を保たないとはいけないことも分かりました。モータの出力はあまり高くありませんが、チリトリ自身の重さと全部で20個のドミノの重さ(ドミノがチリトリに載せた時)を加えるとかなり重くなりました。そのため、このチリトリの機構を上手く動かすために、モータはなるべくチリトリに近いところに付けて、歯車の機構を利用して出力を10倍しました。こうして、一つのモータの小さい出力だけでもチリトリと20個のドミノを持ち上げられるようにできました。
チリトリの寸法は、機能と重さのバランスを考えて決める必要がありました。ドミノはエリア1にランダムに置いてあるので、全部20個をチリトリに入れるためにチリトリの幅はエリア1の直径と等しくしました。そして、チリトリを軽くするために、素材は薄いアルミニウム板で、長さを適切にしました。
もう一つの工夫点はチリトリ用のモータの付ける位置です。LEGO MindStorm は3 つしかありませんが、ロボットを移動するために2個使ったので、チリトリを持ち上げるためのモータを一つしか使えませんでした。そして、ドミノを持ち上げながら移動する時重力でチリトリが下がるのを防ぐため、このモータの出力を保たないとはいけないことも分かりました。モータの出力はあまり高くありませんが、チリトリ自身の重さと全部で20個のドミノの重さ(ドミノがチリトリに載せた時)を加えるとかなり重くなりました。そのため、このチリトリの機構を上手く動かすために、モータはなるべくチリトリに近いところに付けて、歯車の機構を利用して出力を10倍しました。こうして、一つのモータの小さい出力だけでもチリトリと20個のドミノを持ち上げられるようにできました。
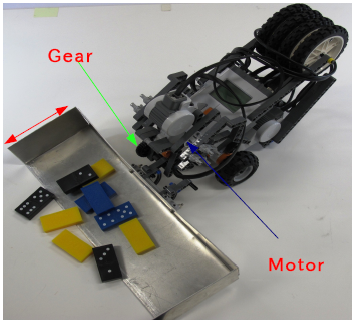
チリトリの幅と歯車とモータ
製作結果とその分析
以上のことに基づいて製作した結果、ドミノをチリトリに入れてエリア2までに運搬することが出来ました。しかし、三つの目的、安定さ、早さ、数の多さのうち、二つの目的、安定さと早さだけが成功しました。ロボットは平均的に一回ごとに三・四個のドミノしか獲得出来ませんでした。
練習のとき、最高の場合でも11個しかドミノを運搬出来ませんでした。そして、チリトリに入らないドミノは逆に邪魔になってロボットの移動方向を変更してしまいましたので、エリア2から離れたこともありました。よく考えると、チリトリの形はまだ不十分ではないかと思っています。チリトリの先端をもっと鋭くしたら良かったかも知れません。そして、このチリトリの機構にとって20個のドミノは少し多すぎるかもしれないので、最初に10個くらいだけをエリア1に置いておくと、全部エリア2まで運搬成功できたら結果的にもっとよくなるだろうかと思っています。
練習のとき、最高の場合でも11個しかドミノを運搬出来ませんでした。そして、チリトリに入らないドミノは逆に邪魔になってロボットの移動方向を変更してしまいましたので、エリア2から離れたこともありました。よく考えると、チリトリの形はまだ不十分ではないかと思っています。チリトリの先端をもっと鋭くしたら良かったかも知れません。そして、このチリトリの機構にとって20個のドミノは少し多すぎるかもしれないので、最初に10個くらいだけをエリア1に置いておくと、全部エリア2まで運搬成功できたら結果的にもっとよくなるだろうかと思っています。
感想
私は今までLEGO みたいなゲームをやったことがありませんでした。今回、初めてLEGO と触れて色々面白かったです。しかし、経験がないので、やりたいことははっきり頭の中に思い浮かべられたものの、どうやって実現するのが大きな問題でした。特に、チリトリを持ち上げる機構、モータの付ける位置などに結構悩みました。幸いなことに、福井先生に助けられてうまく行きました。
このゼミを通して、LEGO、ロボットによるマニビュレーションなどを色々体験出来ました。その難しさだけでなく、面白さもよく感じました。これから、研究室に入ってもっと難しいことを勉強するでしょうが、今回のゼミで習ったことはきっと役に立つと思います。
このゼミを通して、LEGO、ロボットによるマニビュレーションなどを色々体験出来ました。その難しさだけでなく、面白さもよく感じました。これから、研究室に入ってもっと難しいことを勉強するでしょうが、今回のゼミで習ったことはきっと役に立つと思います。