
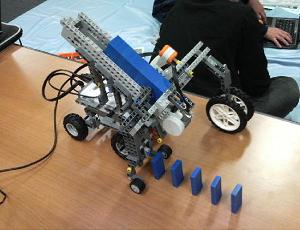
完成したロボット
採用した戦略
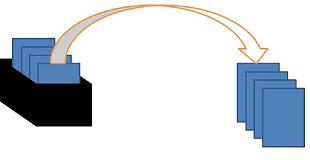
図1
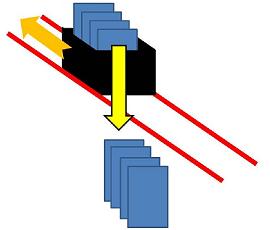
図2
「ドミノを並べるロボットを作れ」という課題を忠実に解釈し、
余分な機能は付けずに「ドミノを並べる」という目的を果たすことに
のみ特化させることにした。そのため、どのような状況でも安定して
ドミノを並べることができるロボットをテーマとした。
機械でドミノを並べる方法はさまざまである。
まず常識的に最初に思いつくのは人間の手を再現して
フィーダーに入っているドミノをつかんで目的地で離す
というやり方だろう。そしてつかむという人間特有の手法
にとらわれないと、磁石で吸いつける、引きずる、押す、
など運び方を工夫できる。これらのやり方はすべてある固定
のフィーダーから目的地まで運ぶという戦略(図1)だが、
さらにその発想にとらわれないと、フィーダーを運んで一つず
つ目的地に置いていく(図2)、すでに整列したかたまりを置く、
(実現性を無視すれば)床とドミノに磁石を取り付けて、適当に
ばらまくだけで、臨んだ形に並べられるようにするなどなど、今
思いつくだけでも多様な戦略がとりうる。
前述のコンセプトを満たすのは図2の考えを発展させたものである。 そして今回のプロジェクトで用いるLEGO MindStormは出力が3つしか なく、一つの出力で複数の機構を動作させない限り、3つの機構しか 搭載できない。しかし、ドミノを指定の位置に運ぶ、フィーダーの ドミノを装填するといった機能の一部をモーターを使わずに、重力と いうもう一つの出力を機構の中に最大限組み込むことで、出力の制約を克服することにした。
製作したロボットの概要
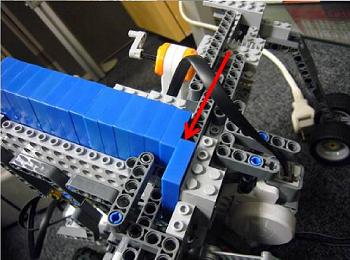
図3
1、フィーダーからドミノを一つ持ってくる。(図3)
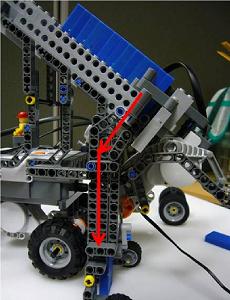
図4
2、ガイドに沿って落とす。 (図4)
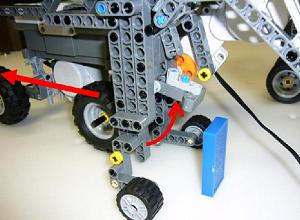
図5
3、ガイドの一部を開いて、ガイドを移動させる。(図5)
機構における工夫点

図6
ドミノを20個以上並べるためには、本体にドミノを20個以上搭載できなければ
ならない。その積載機構が本ロボットの最大の特徴である。
ドミノを斜めに搭載することによって、垂直に搭載した場合には上下左右四方向
からの保持が必要になるが、本ロボットの場合は重力を利用することによって
左右と下の三方向からの保持で十分になっている。こうすることで、パーツ数が
抑えられるだけではなく、ドミノの出し入れが簡単に行えるようになっている。
だが、斜めに置かれたドミノを床に垂直に置く、という問題が発生し、
その部分で構造が複雑化しパーツが多くなってしまった。
本ロボットでは、ドミノの送り出し、ドミノの安定化、本体の移動の3動作にそれぞれ 3個のモーターを使っている。これは、ひとつのモーターにひとつの動作のみを担当 させることによって機構の簡略化を狙ったものである。今回の課題の場合、ドミノの 送り出し、ドミノの安定化、本体の移動を1セットにして繰り返すだけであるので 突き詰めればモーターが一個でも課題を解決することができる。しかしその場合機構 が複雑になってしまうので、できるだけ単純な機構にするためにモーターを三個使用している。
製作結果とその分析
以上のことに基づいて製作した結果、安定して忠実にドミノ並べを行うロボットが 完成した。しかし安定性を重視した分、速度は犠牲になっている。また、前に述 べたとおり斜めに置かれたドミノを垂直して送る際に構造的な問題で失敗してしまうことがあった。 その欠陥はある程度修繕したが、それによってパーツ数が多くなってしまったので簡単でシンプル な構造というコンセプトからは少し離れてしまった。ドミノの角度を変えること(横から縦、 斜めから縦など)は予想以上に難しく、その角度を変えるために構造が複雑化してしまっていたので、 ドミノを床に垂直な状態のまま搭載し並べることができれば構造を単純化することが可能だろう。 それに加えて今回のロボットは大型であったので全体的にコンパクトに収められればさらにパーツ 数が減り単純な構造になることが予想できる。
感想
LEGO mindstormはとても使いやすい素材でした。プログラミングがとても簡単でそこでつまずくことなく
スムーズに調整できました。また、各パーツの規格がそろっているので組み立て分解が非常にしやすく
様々な機構が試せました。このゼミの前に行った創造設計演習では部品はバラバラでその上
プログラミングが大きな壁だったのであまり試行錯誤することができませんでしたが、このゼミでは
mindstormが使えたので組立分解再構築に時間がかからず、その分様々な機構を試してみることができたのでこういった
授業には最高の素材であると思いました。
このゼミを通して、ロボットによるマニピュレーションの奥深さと難しさについて知ることができました。
ドミノを並べるというだけでこれほどの面白さがあるので、マニピュレーションについてさらに
研究をしてみたいという興味がわいてきました。
私はいままでにも簡単なロボットや機械を作ったことは何度かあったが、それらはすべて既定の
キットで指示通りに作るものにすぎなかった。なので、自分の手でロボットを一から考えて
製作するというのは初めての体験だった。
機械の設計は実際にやってみると、単純な直動機構を1つ作るだけでも、構想を実現する部品が
存在しなかったり、機構を固定する骨組みや全体のバランスなど普段は考慮することのない細かな
点まで広く見通しながら作る必要があり、極めて困難なものであったが、それと同時に完成した時
の達成感はいままで味わったことのないほどだった。このゼミを通して身に付けた問題解決のための
取り組みと経験は極めて得難いものであり、来年度以降の研究生活に大きく役に立つはずである。